 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDesign, analysis and control of the series-parallel hybrid RH5 humanoid robot
Paper and Code
Jan 26, 2021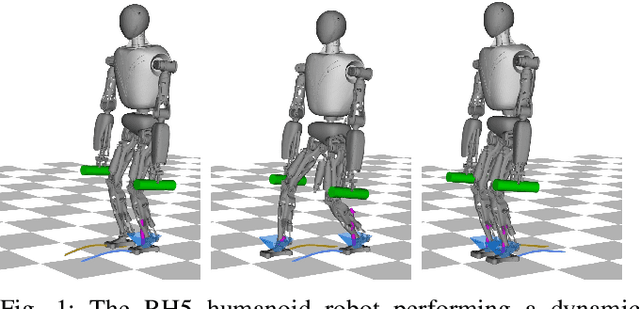

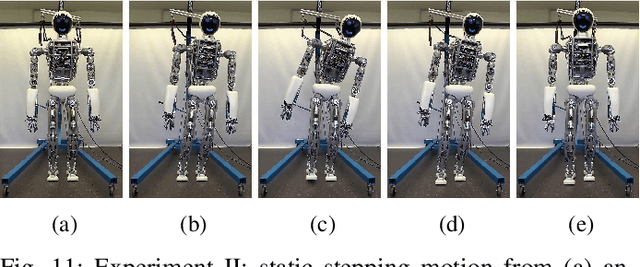
Last decades of humanoid research has shown that humanoids developed for high dynamic performance require a stiff structure and optimal distribution of mass--inertial properties. Humanoid robots built with a purely tree type architecture tend to be bulky and usually suffer from velocity and force/torque limitations. This paper presents a novel series-parallel hybrid humanoid called RH5 which is 2 m tall and weighs only 62.5 kg capable of performing heavy-duty dynamic tasks with 5 kg payloads in each hand. The analysis and control of this humanoid is performed with whole-body trajectory optimization technique based on differential dynamic programming (DDP). Additionally, we present an improved contact stability soft-constrained DDP algorithm which is able to generate physically consistent walking trajectories for the humanoid that can be tracked via a simple PD position control in a physics simulator. Finally, we showcase preliminary experimental results on the RH5 humanoid robot.