 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDepth on Demand: Streaming Dense Depth from a Low Frame Rate Active Sensor
Paper and Code
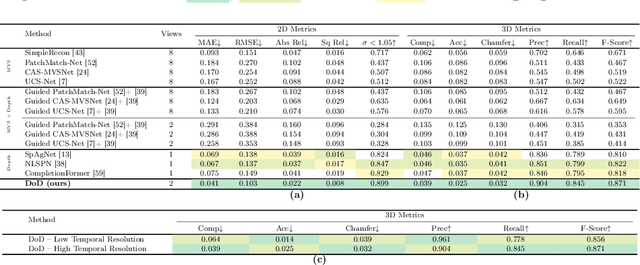

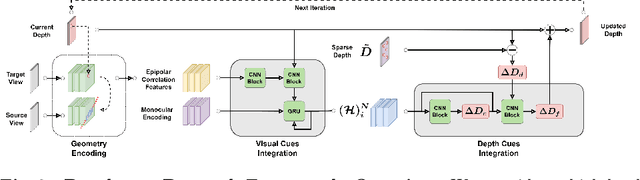
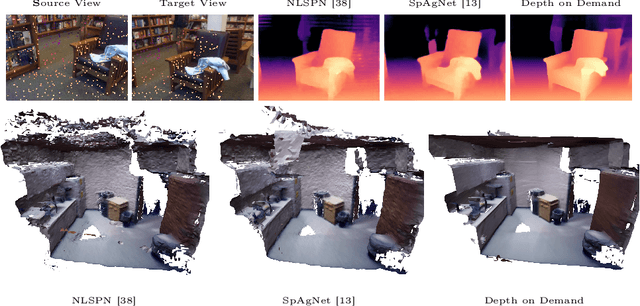
High frame rate and accurate depth estimation plays an important role in several tasks crucial to robotics and automotive perception. To date, this can be achieved through ToF and LiDAR devices for indoor and outdoor applications, respectively. However, their applicability is limited by low frame rate, energy consumption, and spatial sparsity. Depth on Demand (DoD) allows for accurate temporal and spatial depth densification achieved by exploiting a high frame rate RGB sensor coupled with a potentially lower frame rate and sparse active depth sensor. Our proposal jointly enables lower energy consumption and denser shape reconstruction, by significantly reducing the streaming requirements on the depth sensor thanks to its three core stages: i) multi-modal encoding, ii) iterative multi-modal integration, and iii) depth decoding. We present extended evidence assessing the effectiveness of DoD on indoor and outdoor video datasets, covering both environment scanning and automotive perception use cases.