 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDense Supervision Propagation for Weakly Supervised Semantic Segmentation on 3D Point Clouds
Paper and Code
Jul 23, 2021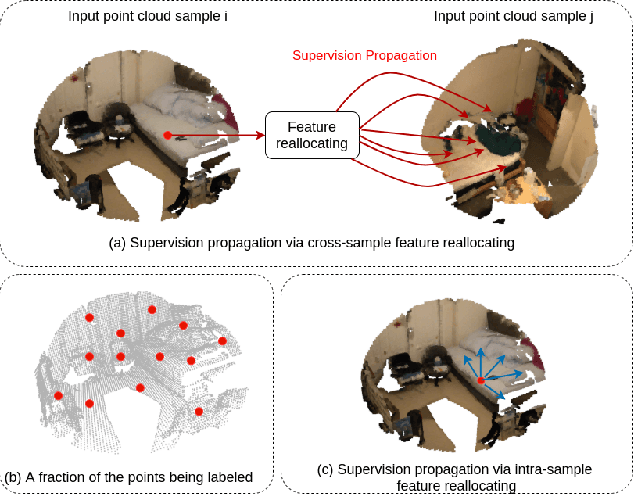
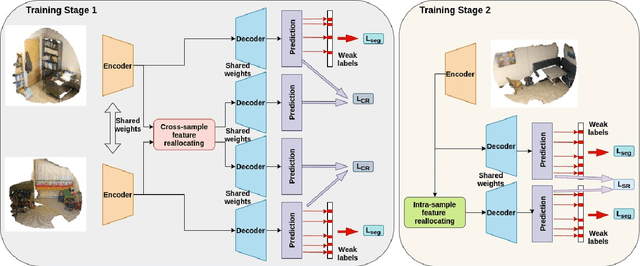
Semantic segmentation on 3D point clouds is an important task for 3D scene understanding. While dense labeling on 3D data is expensive and time-consuming, only a few works address weakly supervised semantic point cloud segmentation methods to relieve the labeling cost by learning from simpler and cheaper labels. Meanwhile, there are still huge performance gaps between existing weakly supervised methods and state-of-the-art fully supervised methods. In this paper, we train a semantic point cloud segmentation network with only a small portion of points being labeled. We argue that we can better utilize the limited supervision information as we densely propagate the supervision signal from the labeled points to other points within and across the input samples. Specifically, we propose a cross-sample feature reallocating module to transfer similar features and therefore re-route the gradients across two samples with common classes and an intra-sample feature redistribution module to propagate supervision signals on unlabeled points across and within point cloud samples. We conduct extensive experiments on public datasets S3DIS and ScanNet. Our weakly supervised method with only 10\% and 1\% of labels can produce compatible results with the fully supervised counterpart.