 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDenoise and Contrast for Category Agnostic Shape Completion
Paper and Code
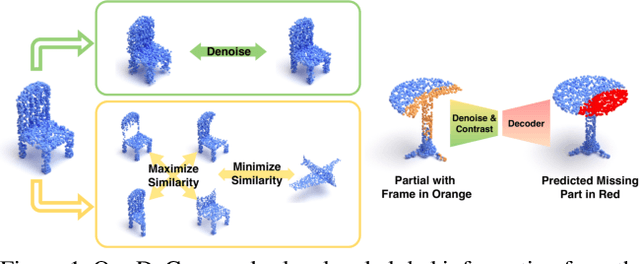
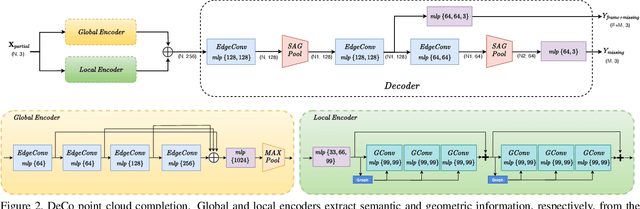
In this paper, we present a deep learning model that exploits the power of self-supervision to perform 3D point cloud completion, estimating the missing part and a context region around it. Local and global information are encoded in a combined embedding. A denoising pretext task provides the network with the needed local cues, decoupled from the high-level semantics and naturally shared over multiple classes. On the other hand, contrastive learning maximizes the agreement between variants of the same shape with different missing portions, thus producing a representation which captures the global appearance of the shape. The combined embedding inherits category-agnostic properties from the chosen pretext tasks. Differently from existing approaches, this allows to better generalize the completion properties to new categories unseen at training time. Moreover, while decoding the obtained joint representation, we better blend the reconstructed missing part with the partial shape by paying attention to its known surrounding region and reconstructing this frame as auxiliary objective. Our extensive experiments and detailed ablation on the ShapeNet dataset show the effectiveness of each part of the method with new state of the art results. Our quantitative and qualitative analysis confirms how our approach is able to work on novel categories without relying neither on classification and shape symmetry priors, nor on adversarial training procedures.