 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDefining Digital Quadruplets in the Cyber-Physical-Social Space for Parallel Driving
Paper and Code
Jul 26, 2020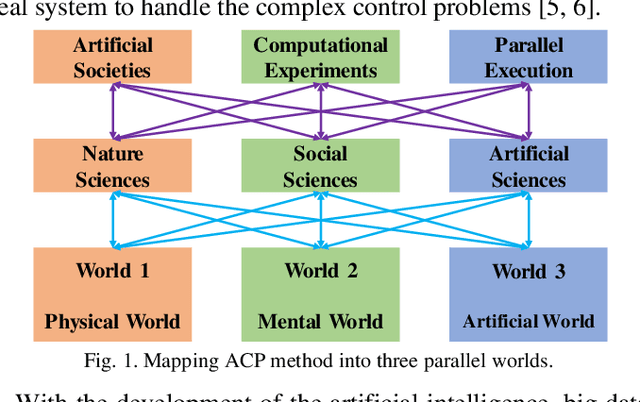
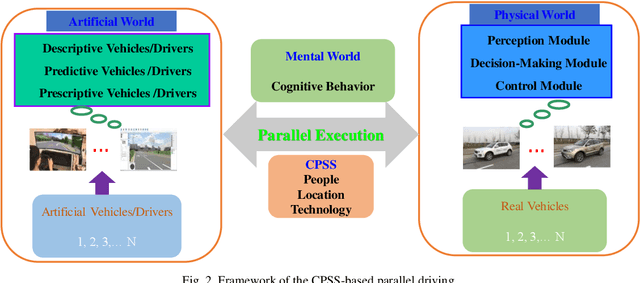
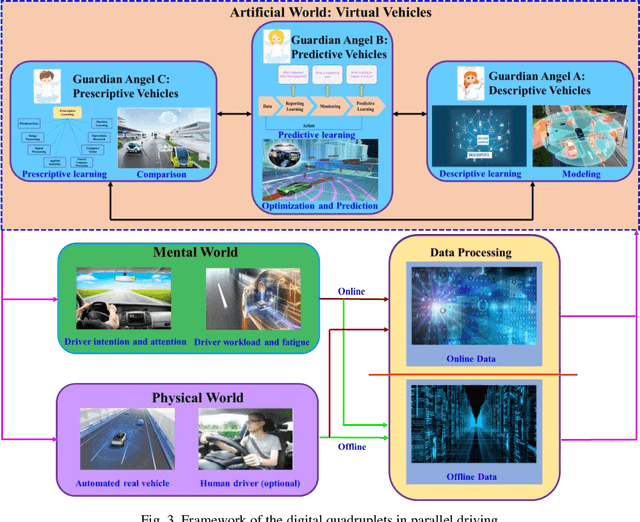
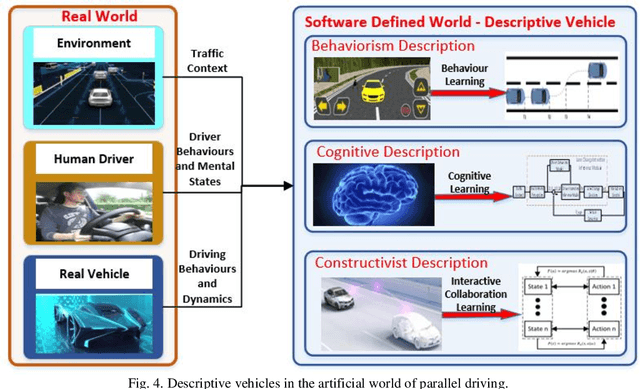
Parallel driving is a novel framework to synthesize vehicle intelligence and transport automation. This article aims to define digital quadruplets in parallel driving. In the cyber-physical-social systems (CPSS), based on the ACP method, the names of the digital quadruplets are first given, which are descriptive, predictive, prescriptive and real vehicles. The objectives of the three virtual digital vehicles are interacting, guiding, simulating and improving with the real vehicles. Then, the three virtual components of the digital quadruplets are introduced in detail and their applications are also illustrated. Finally, the real vehicles in the parallel driving system and the research process of the digital quadruplets are depicted. The presented digital quadruplets in parallel driving are expected to make the future connected automated driving safety, efficiently and synergistically.