 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDeepMNavigate: Deep Reinforced Multi-Robot Navigation Unifying Local & Global Collision Avoidance
Paper and Code
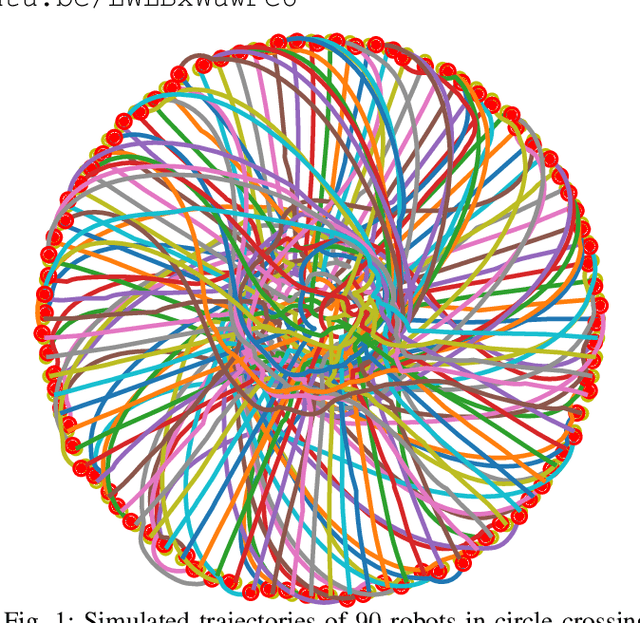
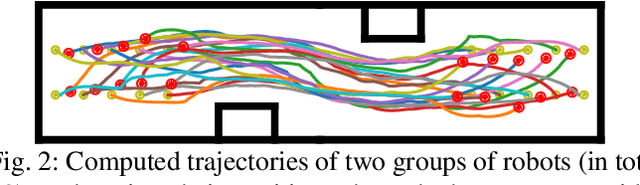
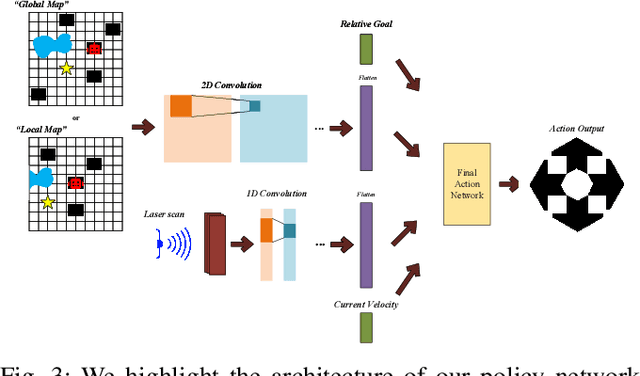
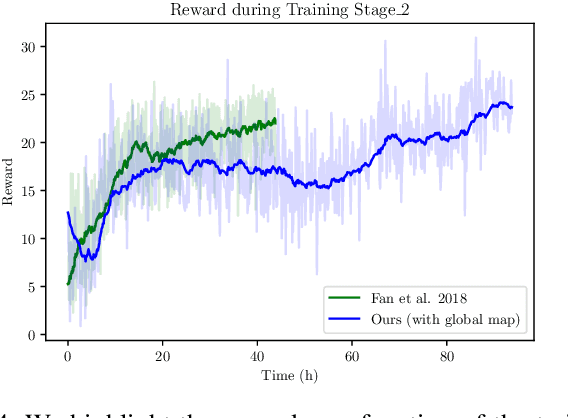
We present a novel algorithm (DeepMNavigate) for global multi-agent navigation in dense scenarios using deep reinforcement learning. Our approach uses local and global information for each robot based on motion information maps. We use a three-layer CNN that uses these maps as input and generate a suitable action to drive each robot to its goal position. Our approach is general, learns an optimal policy using a multi-scenario, multi-state training algorithm, and can directly handle raw sensor measurements for local observations. We demonstrate the performance on complex, dense benchmarks with narrow passages on environments with tens of agents. We highlight the algorithm's benefits over prior learning methods and geometric decentralized algorithms in complex scenarios.