 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDeep Reinforcement Learning for Dexterous Manipulation with Concept Networks
Paper and Code
Sep 20, 2017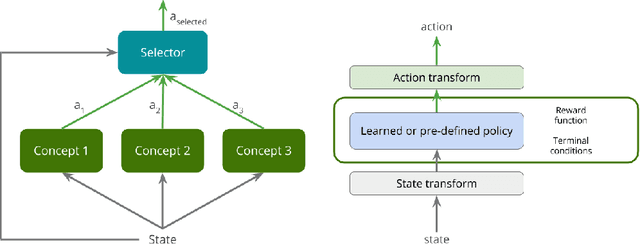
Deep reinforcement learning yields great results for a large array of problems, but models are generally retrained anew for each new problem to be solved. Prior learning and knowledge are difficult to incorporate when training new models, requiring increasingly longer training as problems become more complex. This is especially problematic for problems with sparse rewards. We provide a solution to these problems by introducing Concept Network Reinforcement Learning (CNRL), a framework which allows us to decompose problems using a multi-level hierarchy. Concepts in a concept network are reusable, and flexible enough to encapsulate feature extractors, skills, or other concept networks. With this hierarchical learning approach, deep reinforcement learning can be used to solve complex tasks in a modular way, through problem decomposition. We demonstrate the strength of CNRL by training a model to grasp a rectangular prism and precisely stack it on top of a cube using a gripper on a Kinova JACO arm, simulated in MuJoCo. Our experiments show that our use of hierarchy results in a 45x reduction in environment interactions compared to the state-of-the-art on this task.