 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDeep Masked Graph Matching for Correspondence Identification in Collaborative Perception
Paper and Code
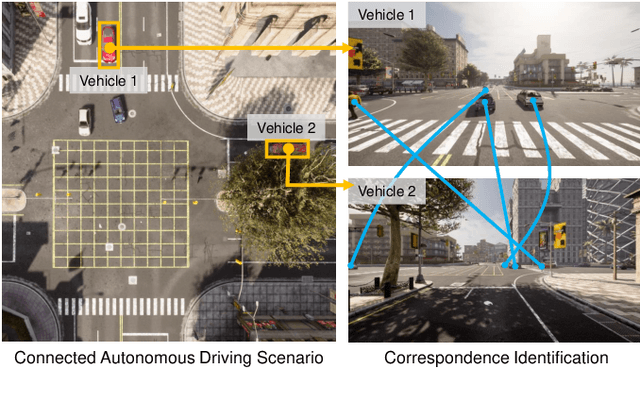
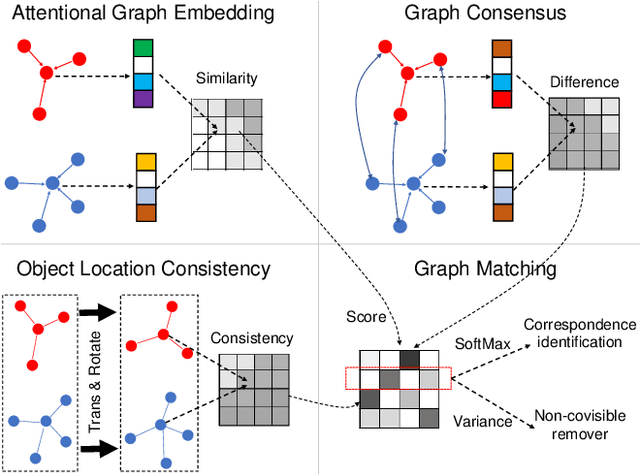


Correspondence identification (CoID) is an essential component for collaborative perception in multi-robot systems, such as connected autonomous vehicles. The goal of CoID is to identify the correspondence of objects observed by multiple robots in their own field of view in order for robots to consistently refer to the same objects. CoID is challenging due to perceptual aliasing, object non-covisibility, and noisy sensing. In this paper, we introduce a novel deep masked graph matching approach to enable CoID and address the challenges. Our approach formulates CoID as a graph matching problem and we design a masked neural network to integrate the multimodal visual, spatial, and GPS information to perform CoID. In addition, we design a new technique to explicitly address object non-covisibility caused by occlusion and the vehicle's limited field of view. We evaluate our approach in a variety of street environments using a high-fidelity simulation that integrates the CARLA and SUMO simulators. The experimental results show that our approach outperforms the previous approaches and achieves state-of-the-art CoID performance in connected autonomous driving applications. Our work is available at: https://github.com/gaopeng5/DMGM.git.