 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDeep Learning for System Trace Restoration
Paper and Code
Apr 10, 2019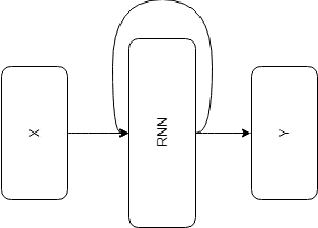
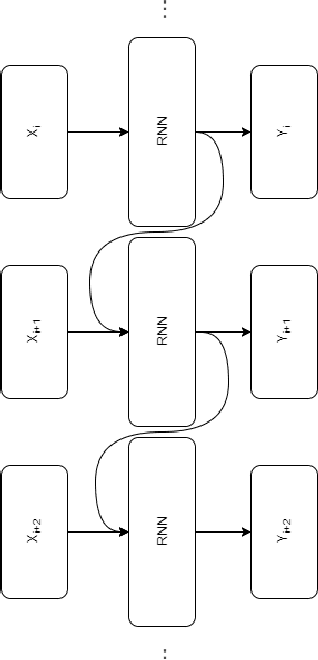
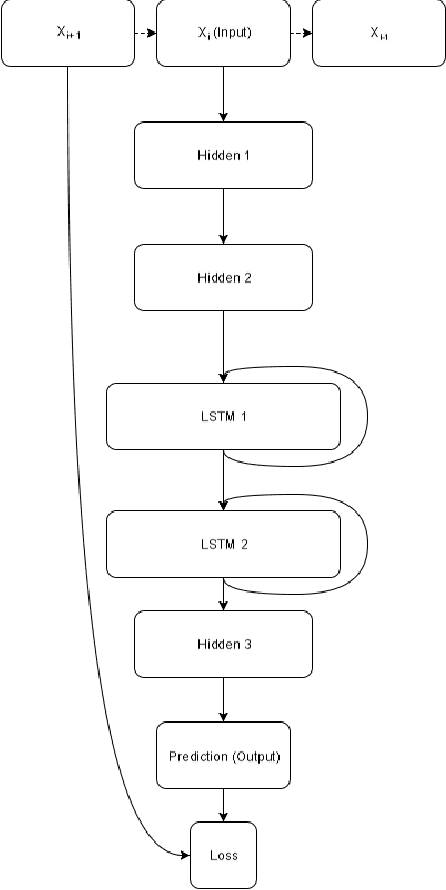
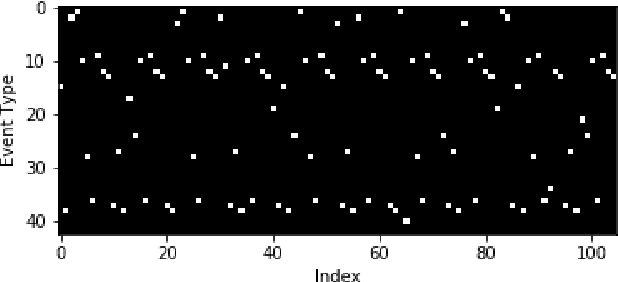
Most real-world datasets, and particularly those collected from physical systems, are full of noise, packet loss, and other imperfections. However, most specification mining, anomaly detection and other such algorithms assume, or even require, perfect data quality to function properly. Such algorithms may work in lab conditions when given clean, controlled data, but will fail in the field when given imperfect data. We propose a method for accurately reconstructing discrete temporal or sequential system traces affected by data loss, using Long Short-Term Memory Networks (LSTMs). The model works by learning to predict the next event in a sequence of events, and uses its own output as an input to continue predicting future events. As a result, this method can be used for data restoration even with streamed data. Such a method can reconstruct even long sequence of missing events, and can also help validate and improve data quality for noisy data. The output of the model will be a close reconstruction of the true data, and can be fed to algorithms that rely on clean data. We demonstrate our method by reconstructing automotive CAN traces consisting of long sequences of discrete events. We show that given even small parts of a CAN trace, our LSTM model can predict future events with an accuracy of almost 90%, and can successfully reconstruct large portions of the original trace, greatly outperforming a Markov Model benchmark. We separately feed the original, lossy, and reconstructed traces into a specification mining framework to perform downstream analysis of the effect of our method on state-of-the-art models that use these traces for understanding the behavior of complex systems.