 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDeep Learning Explicit Differentiable Predictive Control Laws for Buildings
Paper and Code
Jul 25, 2021
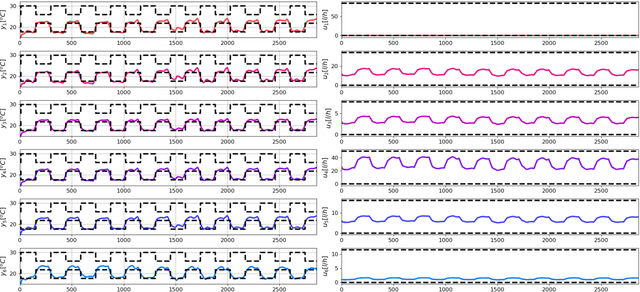
We present a differentiable predictive control (DPC) methodology for learning constrained control laws for unknown nonlinear systems. DPC poses an approximate solution to multiparametric programming problems emerging from explicit nonlinear model predictive control (MPC). Contrary to approximate MPC, DPC does not require supervision by an expert controller. Instead, a system dynamics model is learned from the observed system's dynamics, and the neural control law is optimized offline by leveraging the differentiable closed-loop system model. The combination of a differentiable closed-loop system and penalty methods for constraint handling of system outputs and inputs allows us to optimize the control law's parameters directly by backpropagating economic MPC loss through the learned system model. The control performance of the proposed DPC method is demonstrated in simulation using learned model of multi-zone building thermal dynamics.