 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDeep Learning based Multi-Modal Sensing for Tracking and State Extraction of Small Quadcopters
Paper and Code
Dec 08, 2020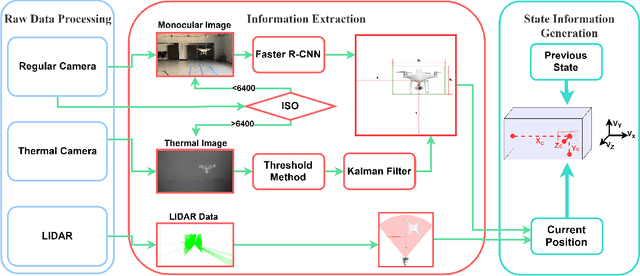
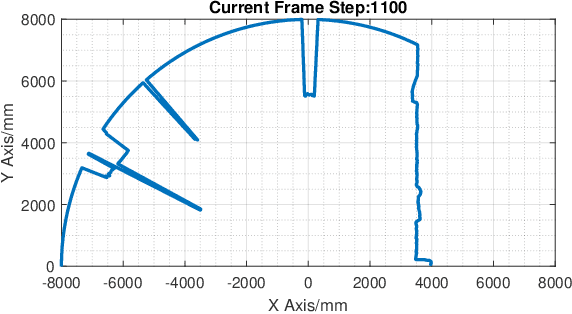
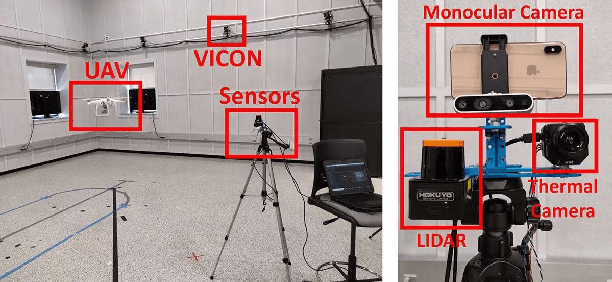
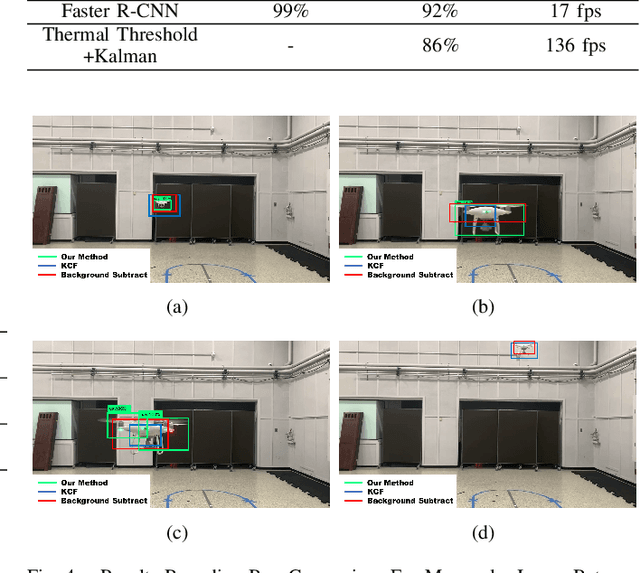
This paper proposes a multi-sensor based approach to detect, track, and localize a quadcopter unmanned aerial vehicle (UAV). Specifically, a pipeline is developed to process monocular RGB and thermal video (captured from a fixed platform) to detect and track the UAV in our FoV. Subsequently, a 2D planar lidar is used to allow conversion of pixel data to actual distance measurements, and thereby enable localization of the UAV in global coordinates. The monocular data is processed through a deep learning-based object detection method that computes an initial bounding box for the UAV. The thermal data is processed through a thresholding and Kalman filter approach to detect and track the bounding box. Training and testing data are prepared by combining a set of original experiments conducted in a motion capture environment and publicly available UAV image data. The new pipeline compares favorably to existing methods and demonstrates promising tracking and localization capacity of sample experiments.