 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDeep Kinematic Models for Physically Realistic Prediction of Vehicle Trajectories
Paper and Code
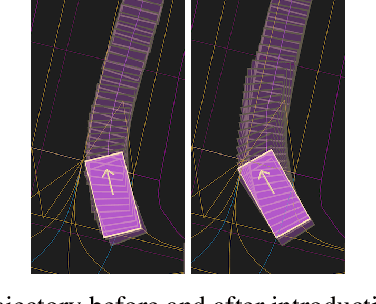
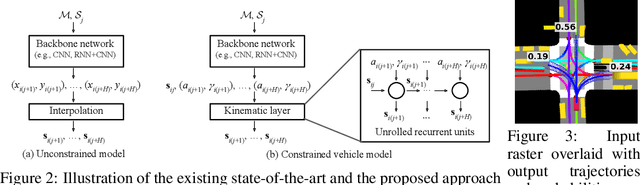
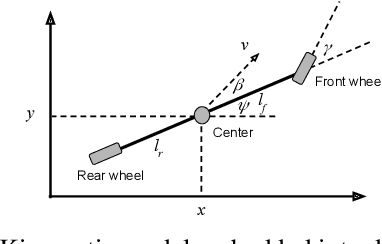
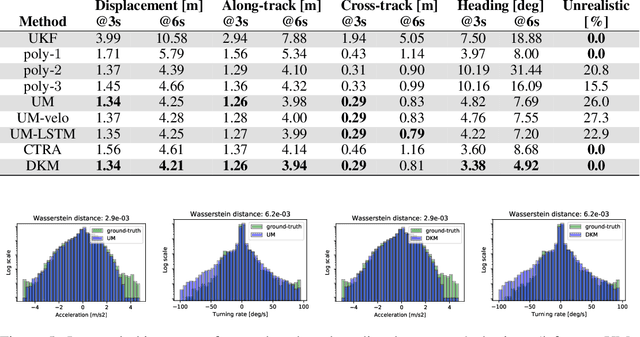
Self-driving vehicles (SDVs) hold great potential for improving traffic safety and are poised to positively affect the quality of life of millions of people. One of the critical aspects of the autonomous technology is understanding and predicting future movement of vehicles surrounding the SDV. This work presents a deep-learning-based method for physically realistic motion prediction of such traffic actors. Previous work did not explicitly encode physical realism and instead relied on the models to learn the laws of physics directly from the data, potentially resulting in implausible trajectory predictions. To account for this issue we propose a method that seamlessly combines ideas from the AI with physically grounded vehicle motion models. In this way we employ best of the both worlds, coupling powerful learning models with strong physical guarantees for their outputs. The proposed approach is general, being applicable to any type of learning method. Extensive experiments using deep convnets on large-scale, real-world data strongly indicate its benefits, outperforming the existing state-of-the-art.