 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDeep Depth Prior for Multi-View Stereo
Paper and Code
Jan 21, 2020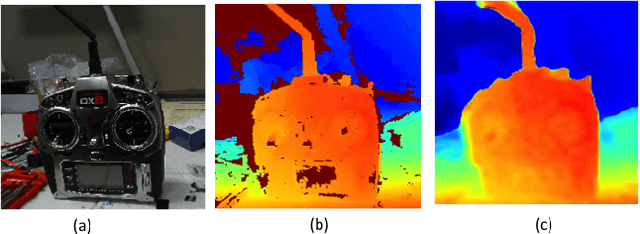
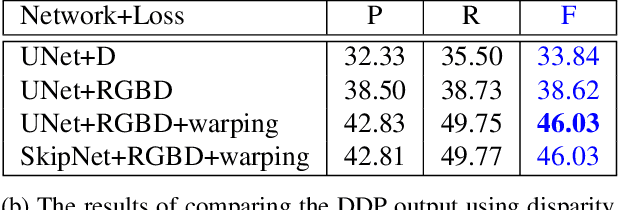
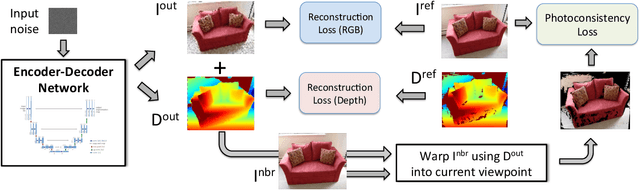
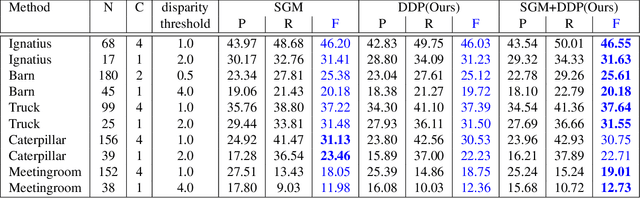
It was recently shown that the structure of convolutional neural networks induces a strong prior favoring natural color images, a phenomena referred to as a deep image prior (DIP), which can be an effective regularizer in inverse problems such as image denoising, inpainting etc. In this paper, we investigate a similar idea for depth images, which we call a deep depth prior. Specifically, given a color image and a noisy and incomplete target depth map from the same viewpoint, we optimize a randomly initialized CNN model to reconstruct an RGB-D image where the depth channel gets restored by virtue of using the network structure as a prior. We propose using deep depth priors for refining and inpainting noisy depth maps within a multi-view stereo pipeline. We optimize the network parameters to minimize two losses 1) a RGB-D reconstruction loss based on the noisy depth map and 2) a multi-view photoconsistency-based loss, which is computed using images from a geometrically calibrated camera from nearby viewpoints. Our quantitative and qualitative evaluation shows that our refined depth maps are more accurate and complete, and after fusion, produces dense 3D models of higher quality.