 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDeep Convolutional Networks are Hierarchical Kernel Machines
Paper and Code
Aug 05, 2015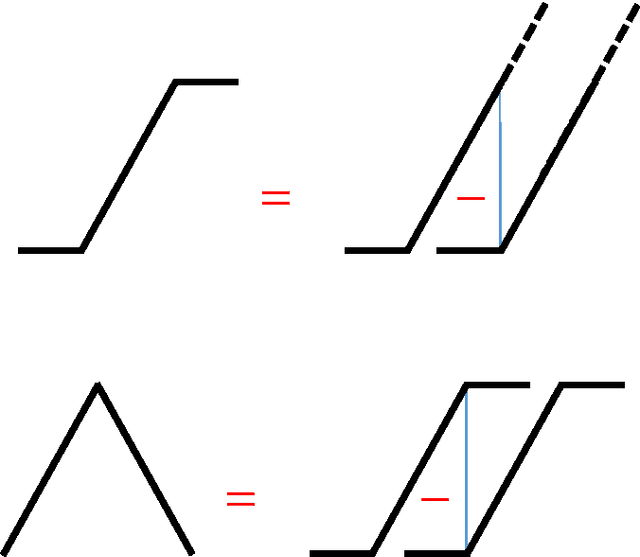
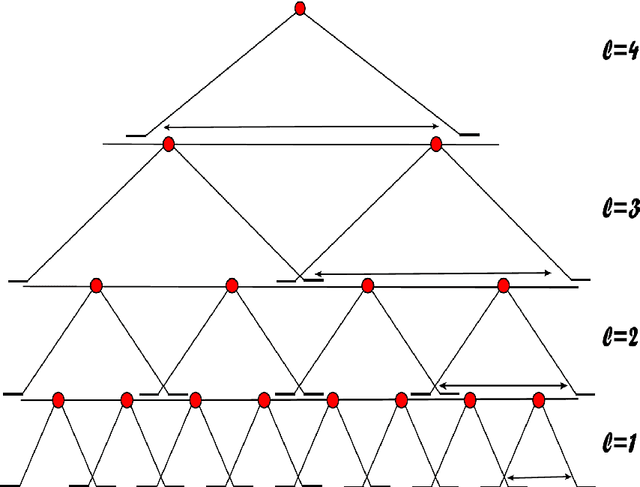
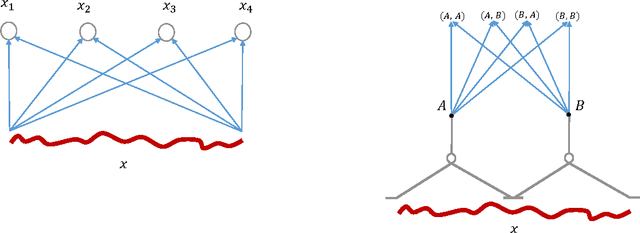
In i-theory a typical layer of a hierarchical architecture consists of HW modules pooling the dot products of the inputs to the layer with the transformations of a few templates under a group. Such layers include as special cases the convolutional layers of Deep Convolutional Networks (DCNs) as well as the non-convolutional layers (when the group contains only the identity). Rectifying nonlinearities -- which are used by present-day DCNs -- are one of the several nonlinearities admitted by i-theory for the HW module. We discuss here the equivalence between group averages of linear combinations of rectifying nonlinearities and an associated kernel. This property implies that present-day DCNs can be exactly equivalent to a hierarchy of kernel machines with pooling and non-pooling layers. Finally, we describe a conjecture for theoretically understanding hierarchies of such modules. A main consequence of the conjecture is that hierarchies of trained HW modules minimize memory requirements while computing a selective and invariant representation.