 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDeep attention-based classification network for robust depth prediction
Paper and Code



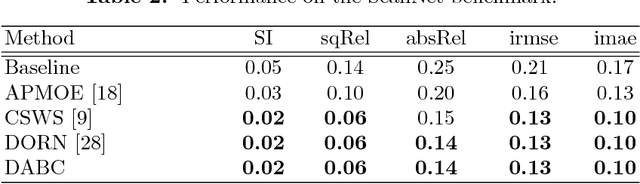
In this paper, we present our deep attention-based classification (DABC) network for robust single image depth prediction, in the context of the Robust Vision Challenge 2018 (ROB 2018). Unlike conventional depth prediction, our goal is to design a model that can perform well in both indoor and outdoor scenes with a single parameter set. However, robust depth prediction suffers from two challenging problems: a) How to extract more discriminative features for different scenes (compared to a single scene)? b) How to handle the large differences of depth ranges between indoor and outdoor datasets? To address these two problems, we first formulate depth prediction as a multi-class classification task and apply a softmax classifier to classify the depth label of each pixel. We then introduce a global pooling layer and a channel-wise attention mechanism to adaptively select the discriminative channels of features and to update the original features by assigning important channels with higher weights. Further, to reduce the influence of quantization errors, we employ a soft-weighted sum inference strategy for the final prediction. Experimental results on both indoor and outdoor datasets demonstrate the effectiveness of our method. It is worth mentioning that we won the 2-nd place in single image depth prediction entry of ROB 2018, in conjunction with IEEE Conference on Computer Vision and Pattern Recognition (CVPR) 2018.