 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDecision-Oriented Intervention Cost Prediction for Multi-robot Persistent Monitoring
Paper and Code
Oct 02, 2023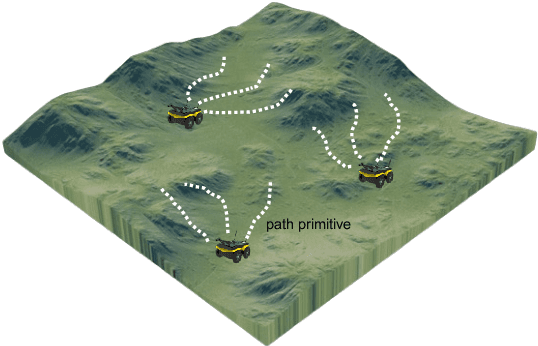
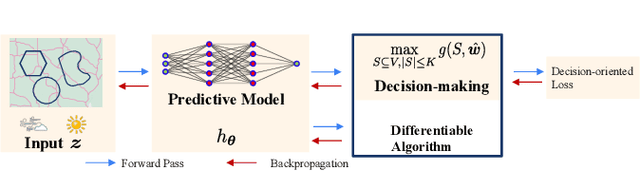

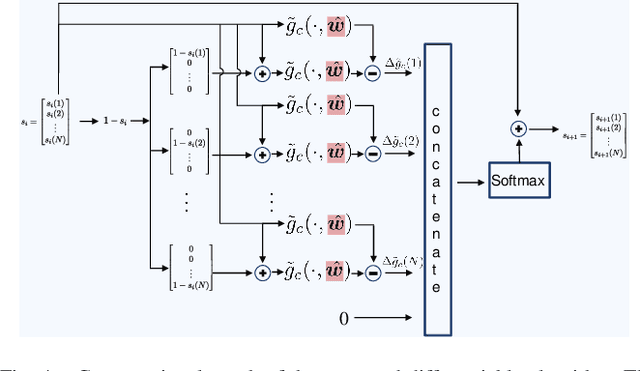
In this paper, we present a differentiable, decision-oriented learning technique for a class of vehicle routing problems. Specifically, we consider a scenario where a team of Unmanned Aerial Vehicles (UAVs) and Unmanned Ground Vehicles (UGVs) are persistently monitoring an environment. The UGVs are occasionally taken over by humans to take detours to recharge the depleted UAVs. The goal is to select routes for the UGVs so that they can efficiently monitor the environment while reducing the cost of interventions. The former is modeled as a monotone, submodular function whereas the latter is a linear function of the routes of the UGVs. We consider a scenario where the former is known but the latter depends on the context (e.g., wind and terrain conditions) that must be learned. Typically, we first learn to predict the cost function and then solve the optimization problem. However, the loss function used in prediction may be misaligned with our final goal of finding good routes. We propose a \emph{decision-oriented learning} framework that incorporates task optimization as a differentiable layer in the prediction phase. To make the task optimization (which is a non-monotone submodular function) differentiable, we propose the Differentiable Cost Scaled Greedy algorithm. We demonstrate the efficacy of the proposed framework through numerical simulations. The results show that the proposed framework can result in better performance than the traditional approach.