 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDecentralized Vision-Based Byzantine Agent Detection in Multi-Robot Systems with IOTA Smart Contracts
Paper and Code
Oct 07, 2022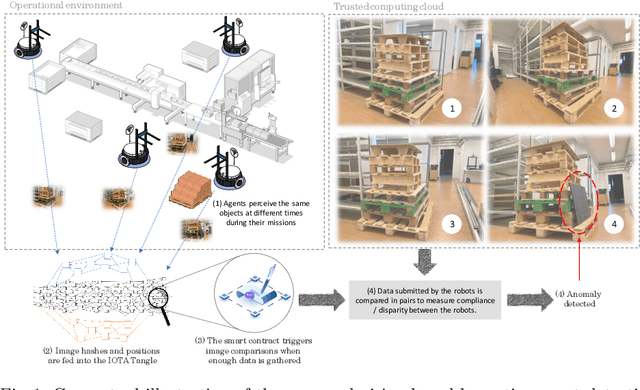


Multiple opportunities lie at the intersection of multi-robot systems and distributed ledger technologies (DLTs). In this work, we investigate the potential of new DLT solutions such as IOTA, for detecting anomalies and byzantine agents in multi-robot systems in a decentralized manner. Traditional blockchain approaches are not applicable to real-world networked and decentralized robotic systems where connectivity conditions are not ideal. To address this, we leverage recent advances in partition-tolerant and byzantine-tolerant collaborative decision-making processes with IOTA smart contracts. We show how our work in vision-based anomaly and change detection can be applied to detecting byzantine agents within multiple robots operating in the same environment. We show that IOTA smart contracts add a low computational overhead while allowing to build trust within the multi-robot system. The proposed approach effectively enables byzantine robot detection based on the comparison of images submitted by the different robots and detection of anomalies and changes between them.