 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDecentralized Safe and Scalable Multi-Agent Control under Limited Actuation
Paper and Code
Sep 15, 2024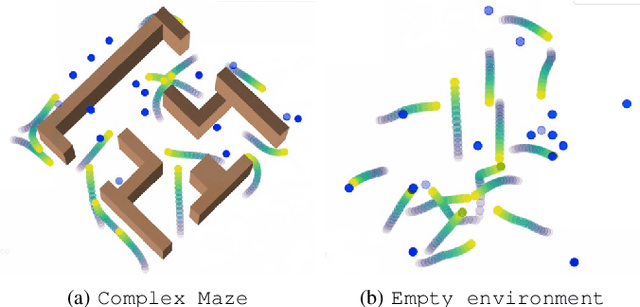
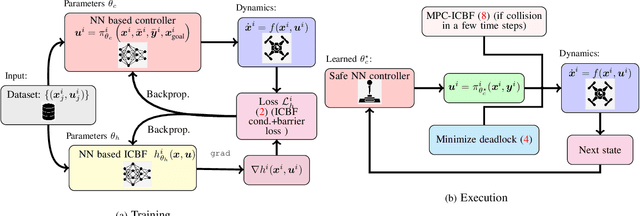
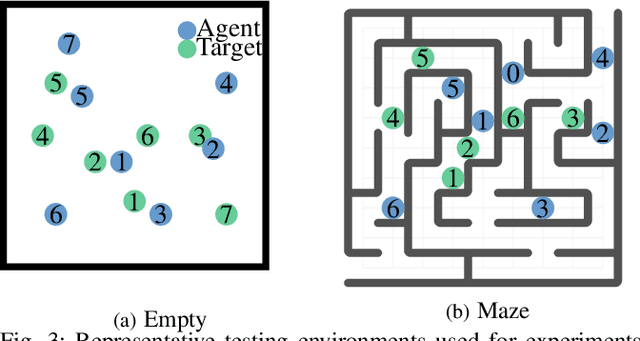
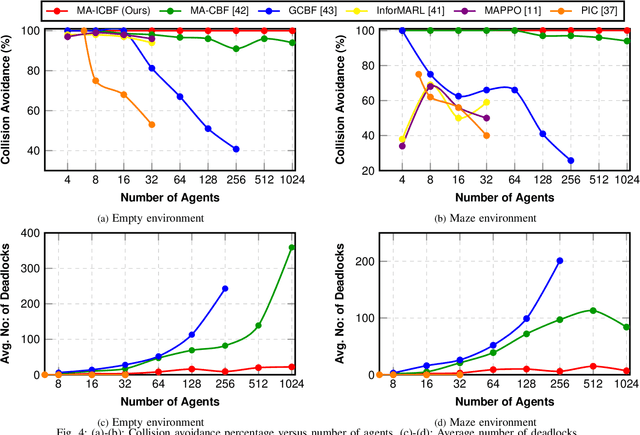
To deploy safe and agile robots in cluttered environments, there is a need to develop fully decentralized controllers that guarantee safety, respect actuation limits, prevent deadlocks, and scale to thousands of agents. Current approaches fall short of meeting all these goals: optimization-based methods ensure safety but lack scalability, while learning-based methods scale but do not guarantee safety. We propose a novel algorithm to achieve safe and scalable control for multiple agents under limited actuation. Specifically, our approach includes: $(i)$ learning a decentralized neural Integral Control Barrier function (neural ICBF) for scalable, input-constrained control, $(ii)$ embedding a lightweight decentralized Model Predictive Control-based Integral Control Barrier Function (MPC-ICBF) into the neural network policy to ensure safety while maintaining scalability, and $(iii)$ introducing a novel method to minimize deadlocks based on gradient-based optimization techniques from machine learning to address local minima in deadlocks. Our numerical simulations show that this approach outperforms state-of-the-art multi-agent control algorithms in terms of safety, input constraint satisfaction, and minimizing deadlocks. Additionally, we demonstrate strong generalization across scenarios with varying agent counts, scaling up to 1000 agents.