 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDecentralized Rigidity Maintenance Control with Range Measurements for Multi-Robot Systems
Paper and Code
Sep 04, 2014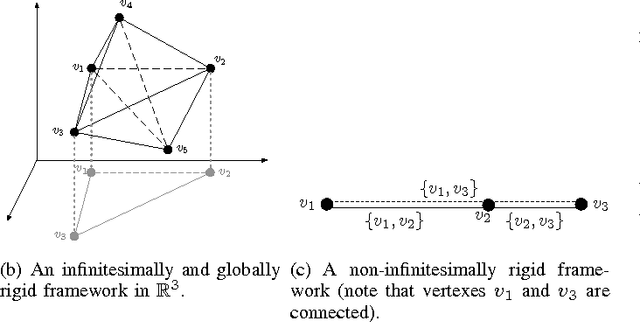
This work proposes a fully decentralized strategy for maintaining the formation rigidity of a multi-robot system using only range measurements, while still allowing the graph topology to change freely over time. In this direction, a first contribution of this work is an extension of rigidity theory to weighted frameworks and the rigidity eigenvalue, which when positive ensures the infinitesimal rigidity of the framework. We then propose a distributed algorithm for estimating a common relative position reference frame amongst a team of robots with only range measurements in addition to one agent endowed with the capability of measuring the bearing to two other agents. This first estimation step is embedded into a subsequent distributed algorithm for estimating the rigidity eigenvalue associated with the weighted framework. The estimate of the rigidity eigenvalue is finally used to generate a local control action for each agent that both maintains the rigidity property and enforces additional con- straints such as collision avoidance and sensing/communication range limits and occlusions. As an additional feature of our approach, the communication and sensing links among the robots are also left free to change over time while preserving rigidity of the whole framework. The proposed scheme is then experimentally validated with a robotic testbed consisting of 6 quadrotor UAVs operating in a cluttered environment.