 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDecentralized and Asymmetric Multi-Agent Learning in Construction Sites
Paper and Code
Sep 16, 2024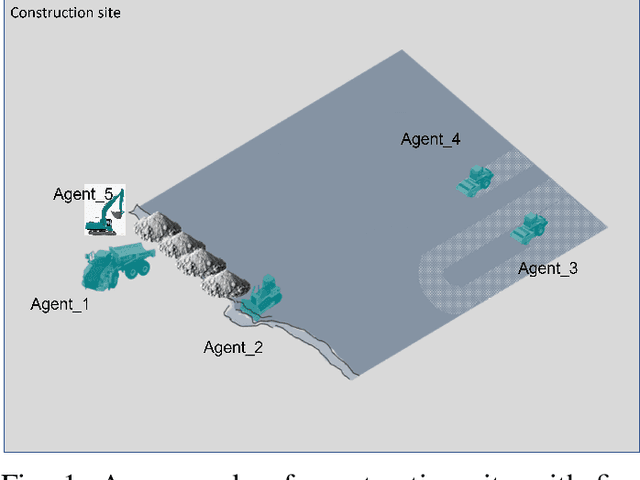
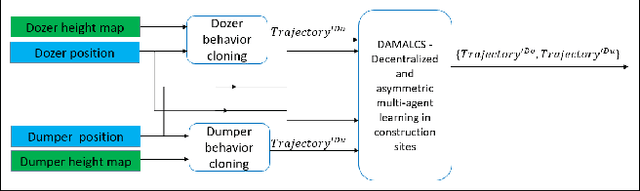
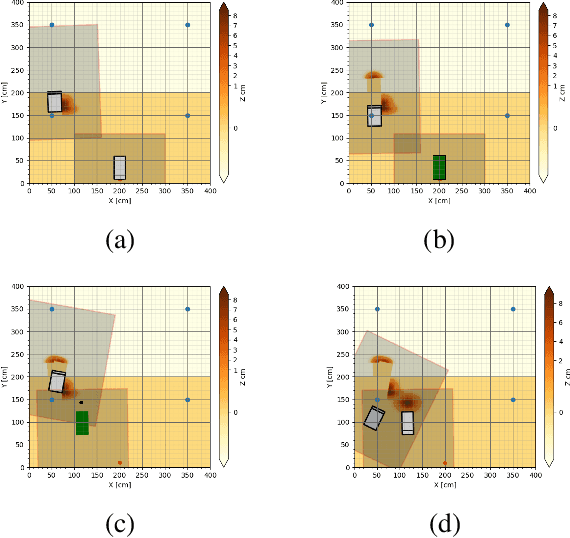
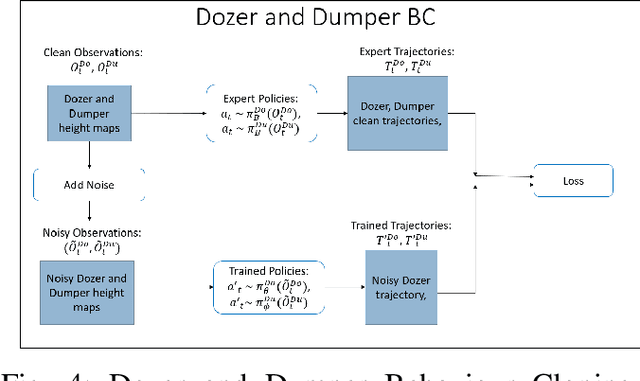
Multi-agent collaboration involves multiple participants working together in a shared environment to achieve a common goal. These agents share information, divide tasks, and synchronize their actions. Key aspects of multi agent collaboration include coordination, communication, task allocation, cooperation, adaptation, and decentralization. On construction sites, surface grading is the process of leveling sand piles to increase a specific area's height. In this scenario, a bulldozer grades while a dumper allocates sand piles. Our work aims to utilize a multi-agent approach to enable these vehicles to collaborate effectively. To this end, we propose a decentralized and asymmetric multi-agent learning approach for construction sites (DAMALCS). We formulate DAMALCS to reduce expected collisions for operating vehicles. Therefore, we develop two heuristic experts capable of achieving their joint goal optimally by applying an innovative prioritization method. In this approach, the bulldozer's movements take precedence over the dumper's operations, enabling the bulldozer to clear the path for the dumper and ensure continuous operation of both vehicles. Since heuristics alone are insufficient in real-world scenarios, we utilize them to train AI agents, which proves to be highly effective. We simultaneously train the bulldozer and dumper agents to operate within the same environment, aiming to avoid collisions and optimize performance in terms of time efficiency and sand volume handling. Our trained agents and heuristics are evaluated in both simulation and real-world lab experiments, testing them under various conditions, such as visual noise and localization errors. The results demonstrate that our approach significantly reduces collision rates for these vehicles.