 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDECAF: a Discrete-Event based Collaborative Human-Robot Framework for Furniture Assembly
Paper and Code
Aug 28, 2024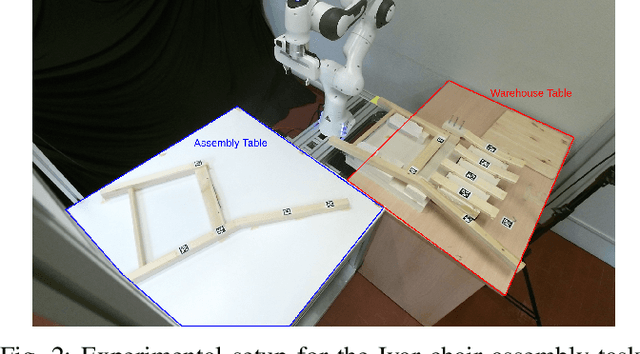
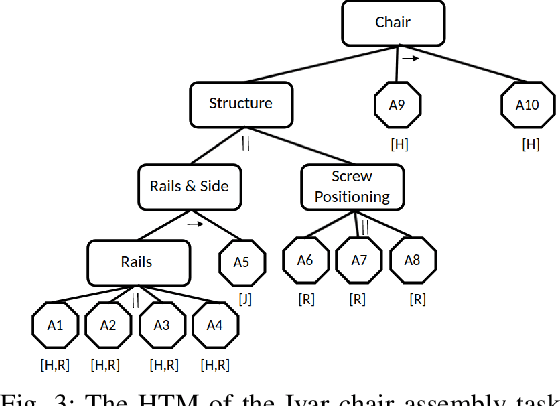
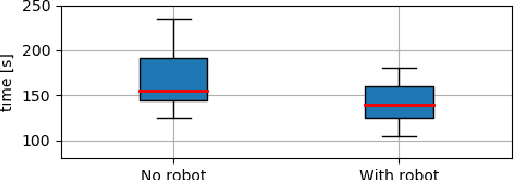
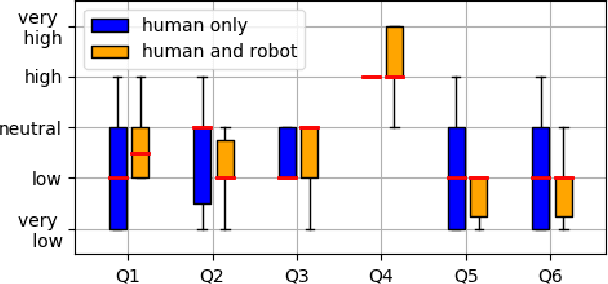
This paper proposes a task planning framework for collaborative Human-Robot scenarios, specifically focused on assembling complex systems such as furniture. The human is characterized as an uncontrollable agent, implying for example that the agent is not bound by a pre-established sequence of actions and instead acts according to its own preferences. Meanwhile, the task planner computes reactively the optimal actions for the collaborative robot to efficiently complete the entire assembly task in the least time possible. We formalize the problem as a Discrete Event Markov Decision Problem (DE-MDP), a comprehensive framework that incorporates a variety of asynchronous behaviors, human change of mind and failure recovery as stochastic events. Although the problem could theoretically be addressed by constructing a graph of all possible actions, such an approach would be constrained by computational limitations. The proposed formulation offers an alternative solution utilizing Reinforcement Learning to derive an optimal policy for the robot. Experiments where conducted both in simulation and on a real system with human subjects assembling a chair in collaboration with a 7-DoF manipulator.