 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDealing with Ambiguity in Robotic Grasping via Multiple Predictions
Paper and Code
Nov 02, 2018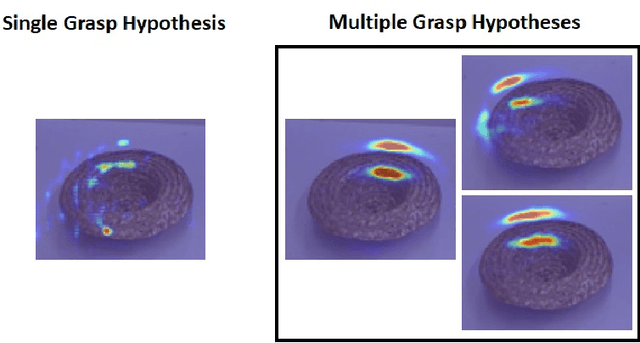
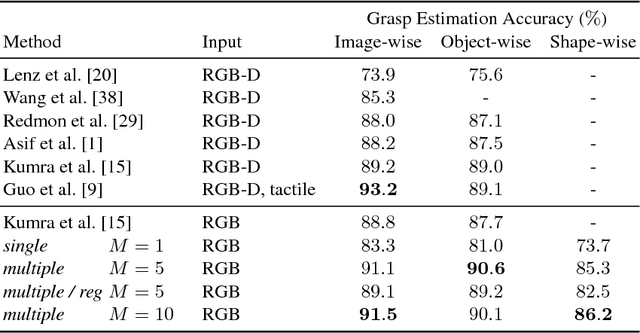
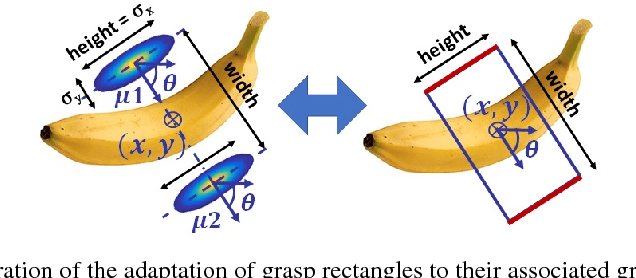
Humans excel in grasping and manipulating objects because of their life-long experience and knowledge about the 3D shape and weight distribution of objects. However, the lack of such intuition in robots makes robotic grasping an exceptionally challenging task. There are often several equally viable options of grasping an object. However, this ambiguity is not modeled in conventional systems that estimate a single, optimal grasp position. We propose to tackle this problem by simultaneously estimating multiple grasp poses from a single RGB image of the target object. Further, we reformulate the problem of robotic grasping by replacing conventional grasp rectangles with grasp belief maps, which hold more precise location information than a rectangle and account for the uncertainty inherent to the task. We augment a fully convolutional neural network with a multiple hypothesis prediction model that predicts a set of grasp hypotheses in under 60ms, which is critical for real-time robotic applications. The grasp detection accuracy reaches over 90% for unseen objects, outperforming the current state of the art on this task.