 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDe-noising, Stabilizing and Completing 3D Reconstructions On-the-go using Plane Priors
Paper and Code
Mar 28, 2017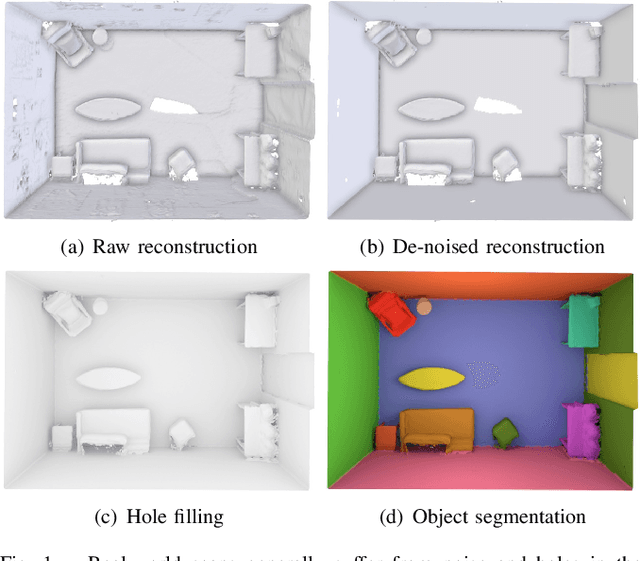
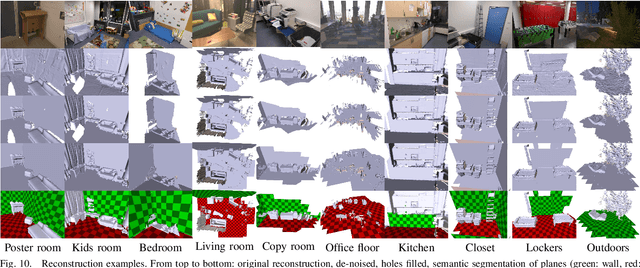
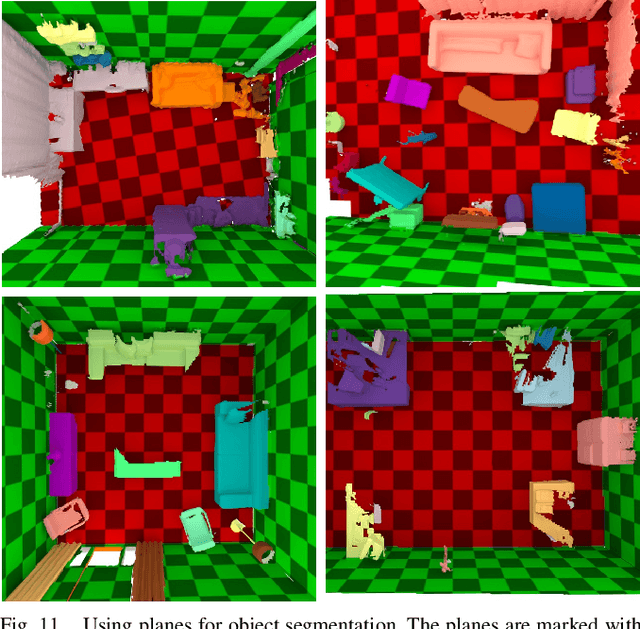
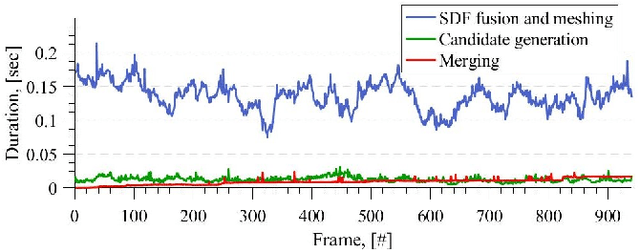
Creating 3D maps on robots and other mobile devices has become a reality in recent years. Online 3D reconstruction enables many exciting applications in robotics and AR/VR gaming. However, the reconstructions are noisy and generally incomplete. Moreover, during onine reconstruction, the surface changes with every newly integrated depth image which poses a significant challenge for physics engines and path planning algorithms. This paper presents a novel, fast and robust method for obtaining and using information about planar surfaces, such as walls, floors, and ceilings as a stage in 3D reconstruction based on Signed Distance Fields. Our algorithm recovers clean and accurate surfaces, reduces the movement of individual mesh vertices caused by noise during online reconstruction and fills in the occluded and unobserved regions. We implemented and evaluated two different strategies to generate plane candidates and two strategies for merging them. Our implementation is optimized to run in real-time on mobile devices such as the Tango tablet. In an extensive set of experiments, we validated that our approach works well in a large number of natural environments despite the presence of significant amount of occlusion, clutter and noise, which occur frequently. We further show that plane fitting enables in many cases a meaningful semantic segmentation of real-world scenes.