 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDDD17: End-To-End DAVIS Driving Dataset
Paper and Code
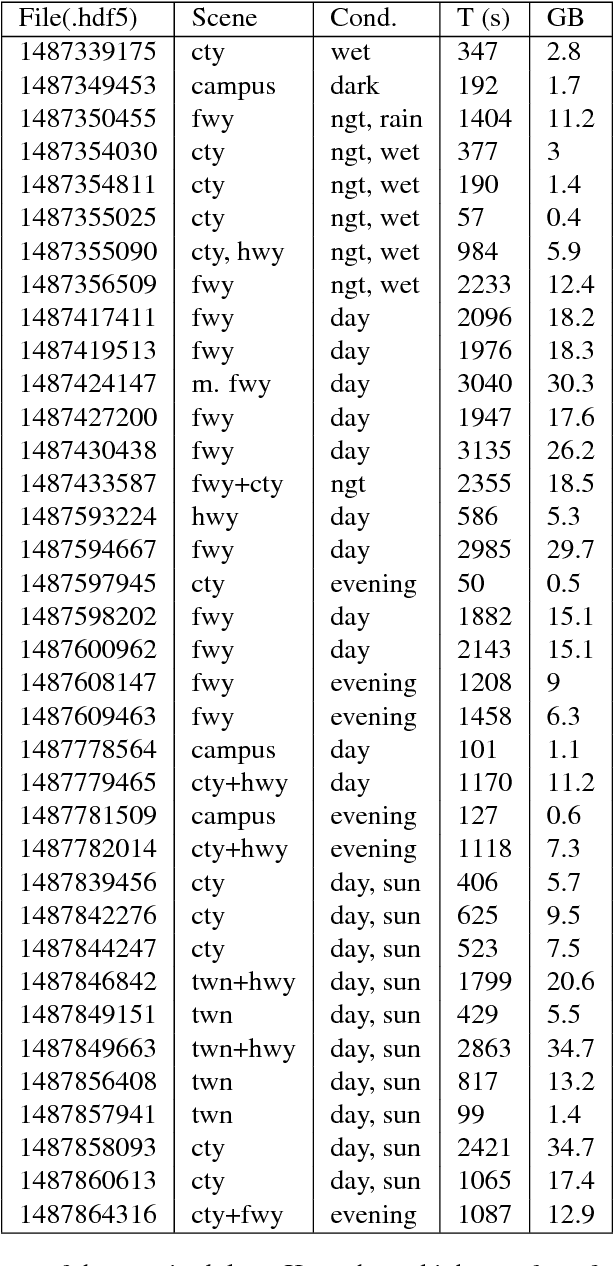
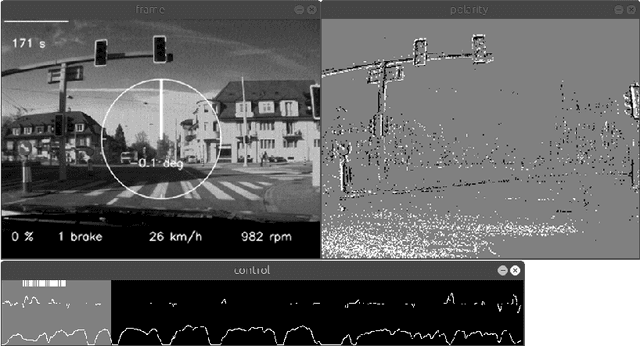
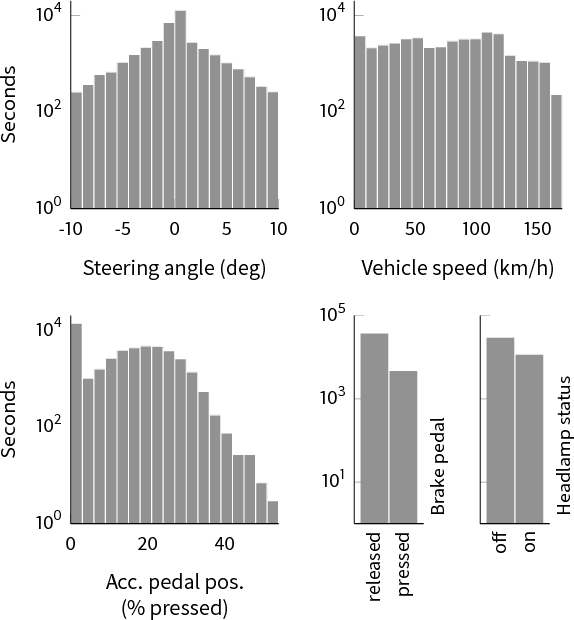
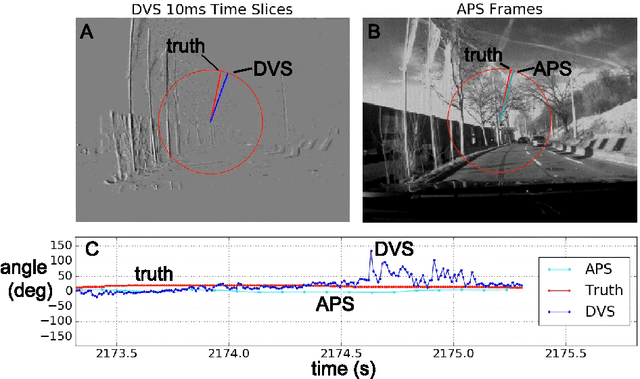
Event cameras, such as dynamic vision sensors (DVS), and dynamic and active-pixel vision sensors (DAVIS) can supplement other autonomous driving sensors by providing a concurrent stream of standard active pixel sensor (APS) images and DVS temporal contrast events. The APS stream is a sequence of standard grayscale global-shutter image sensor frames. The DVS events represent brightness changes occurring at a particular moment, with a jitter of about a millisecond under most lighting conditions. They have a dynamic range of >120 dB and effective frame rates >1 kHz at data rates comparable to 30 fps (frames/second) image sensors. To overcome some of the limitations of current image acquisition technology, we investigate in this work the use of the combined DVS and APS streams in end-to-end driving applications. The dataset DDD17 accompanying this paper is the first open dataset of annotated DAVIS driving recordings. DDD17 has over 12 h of a 346x260 pixel DAVIS sensor recording highway and city driving in daytime, evening, night, dry and wet weather conditions, along with vehicle speed, GPS position, driver steering, throttle, and brake captured from the car's on-board diagnostics interface. As an example application, we performed a preliminary end-to-end learning study of using a convolutional neural network that is trained to predict the instantaneous steering angle from DVS and APS visual data.