 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeData-Driven Target Localization: Benchmarking Gradient Descent Using the Cramér-Rao Bound
Paper and Code
Jan 20, 2024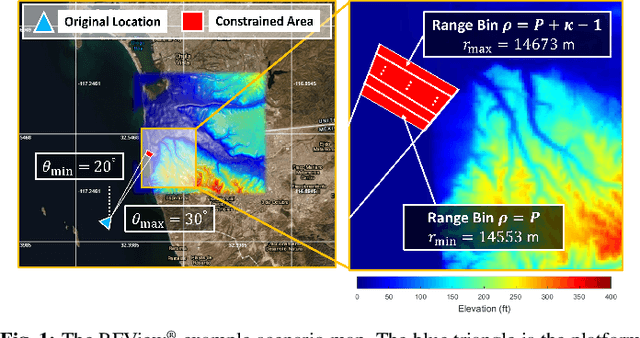
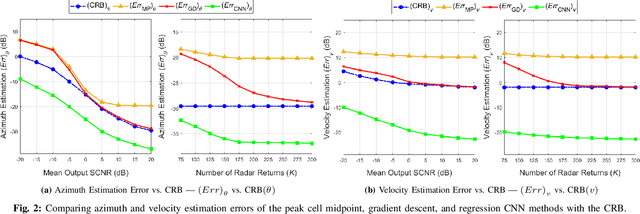

In modern radar systems, precise target localization using azimuth and velocity estimation is paramount. Traditional unbiased estimation methods have leveraged gradient descent algorithms to reach the theoretical limits of the Cram\'er Rao Bound (CRB) for the error of the parameter estimates. In this study, we present a data-driven neural network approach that outperforms these traditional techniques, demonstrating improved accuracies in target azimuth and velocity estimation. Using a representative simulated scenario, we show that our proposed neural network model consistently achieves improved parameter estimates due to its inherently biased nature, yielding a diminished mean squared error (MSE). Our findings underscore the potential of employing deep learning methods in radar systems, paving the way for more accurate localization in cluttered and dynamic environments.