Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeData-Driven Reachability Analysis Using Matrix Zonotopes
Paper and Code
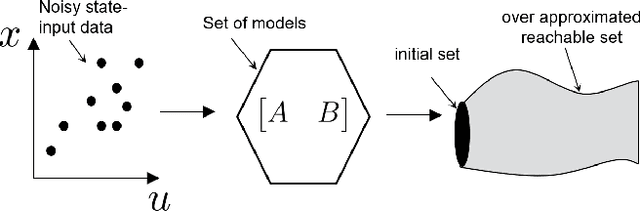
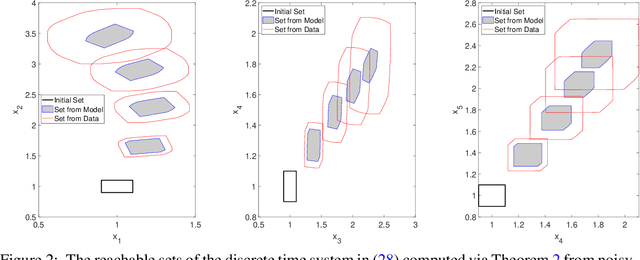
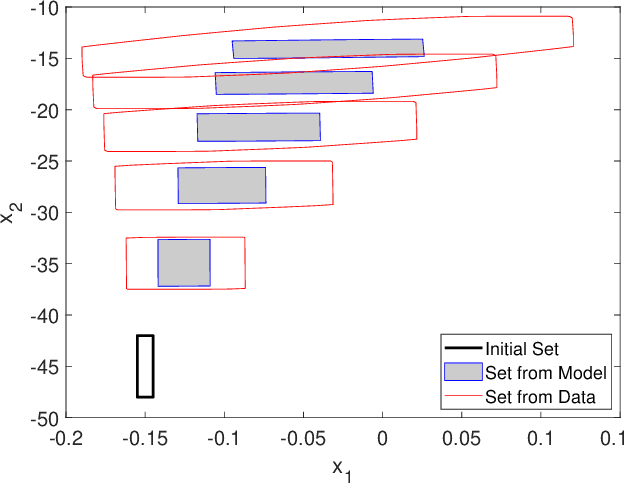
In this paper, we propose a data-driven reachability analysis approach for an unknown control system. Reachability analysis is an essential tool for guaranteeing safety properties. However, most current reachability analysis heavily relies on the existence of a suitable system model, which is often not directly available in practice. We instead propose a reachability analysis approach based on noisy data. More specifically, we first provide an algorithm for over-approximating the reachable set of a linear time-invariant system using matrix zonotopes. Then we introduce an extension for nonlinear systems. We provide theoretical guarantees in both cases. Numerical examples show the potential and applicability of the introduced methods.
* 13 pages
View paper on