 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCVLight: Deep Reinforcement Learning for Adaptive Traffic Signal Control with Connected Vehicles
Paper and Code
Apr 21, 2021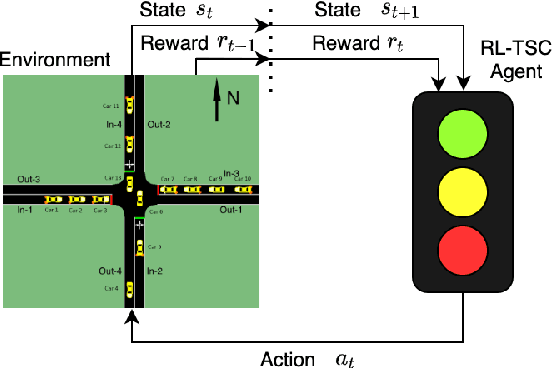
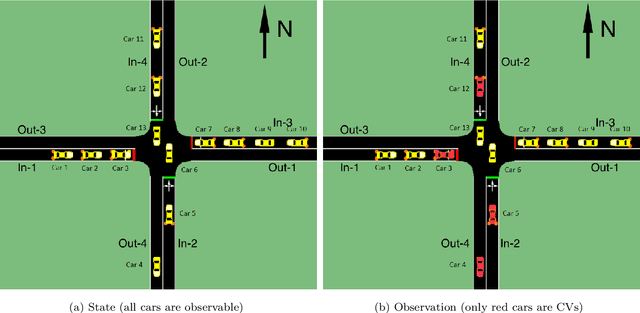
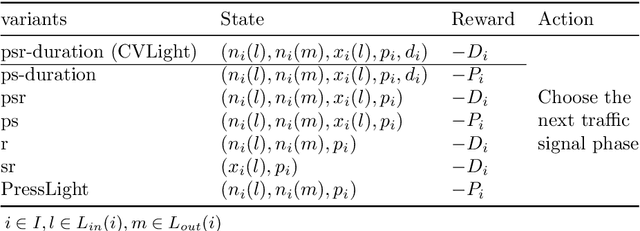
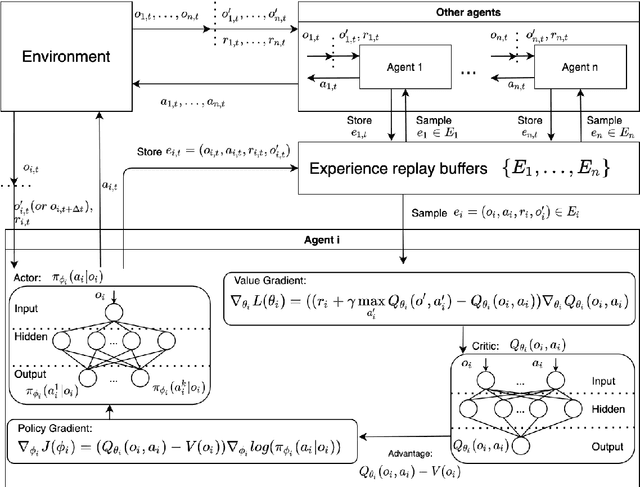
This paper develops a reinforcement learning (RL) scheme for adaptive traffic signal control (ATSC), called "CVLight", that leverages data collected only from connected vehicles (CV). Seven types of RL models are proposed within this scheme that contain various state and reward representations, including incorporation of CV delay and green light duration into state and the usage of CV delay as reward. To further incorporate information of both CV and non-CV into CVLight, an algorithm based on actor-critic, A2C-Full, is proposed where both CV and non-CV information is used to train the critic network, while only CV information is used to update the policy network and execute optimal signal timing. These models are compared at an isolated intersection under various CV market penetration rates. A full model with the best performance (i.e., minimum average travel delay per vehicle) is then selected and applied to compare with state-of-the-art benchmarks under different levels of traffic demands, turning proportions, and dynamic traffic demands, respectively. Two case studies are performed on an isolated intersection and a corridor with three consecutive intersections located in Manhattan, New York, to further demonstrate the effectiveness of the proposed algorithm under real-world scenarios. Compared to other baseline models that use all vehicle information, the trained CVLight agent can efficiently control multiple intersections solely based on CV data and can achieve a similar or even greater performance when the CV penetration rate is no less than 20%.