 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCuriosity-based Robot Navigation under Uncertainty in Crowded Environments
Paper and Code
Jun 10, 2021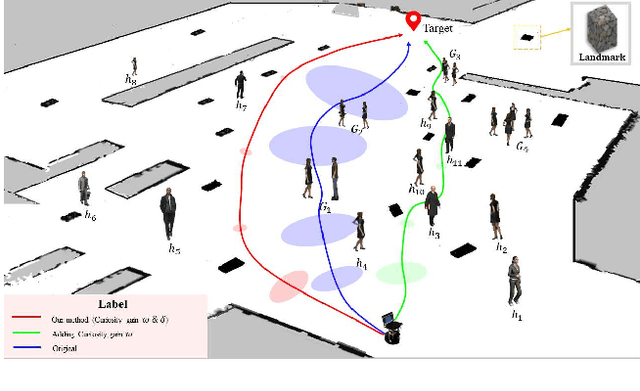
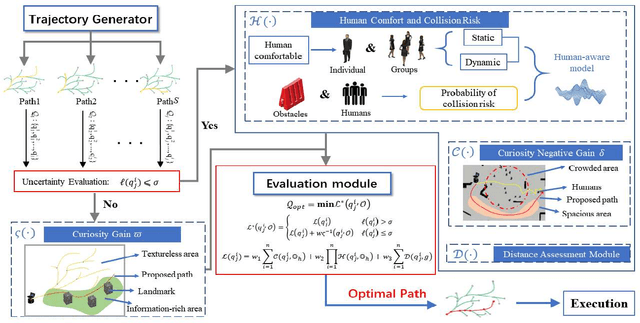
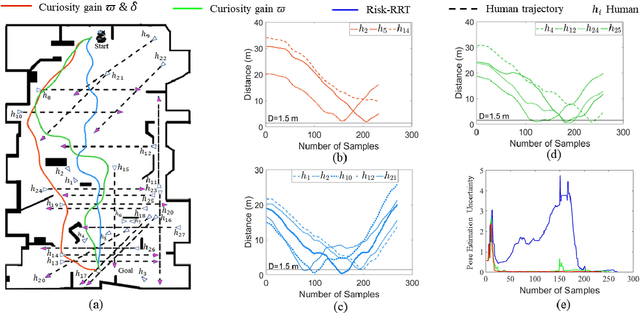

Mobile robots have become more and more popular in our daily life. In large-scale and crowded environments, how to navigate safely with localization precision is a critical problem. To solve this problem, we proposed a curiosity-based framework that can find an effective path with the consideration of human comfort, localization uncertainty, crowds, and the cost-to-go to the target. Three parts are involved in the proposed framework: the distance assessment module, the curiosity gain of the information-rich area, and the curiosity negative gain of crowded areas. The curiosity gain of the information-rich area was proposed to provoke the robot to approach localization referenced landmarks. To guarantee human comfort while coexisting with robots, we propose curiosity gain of the spacious area to bypass the crowd and maintain an appropriate distance between robots and humans. The evaluation is conducted in an unstructured environment. The results show that our method can find a feasible path, which can consider the localization uncertainty while simultaneously avoiding the crowded area. Curiosity-based Robot Navigation under Uncertainty in Crowded Environments