 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCross-Modal Attentional Context Learning for RGB-D Object Detection
Paper and Code
Oct 30, 2018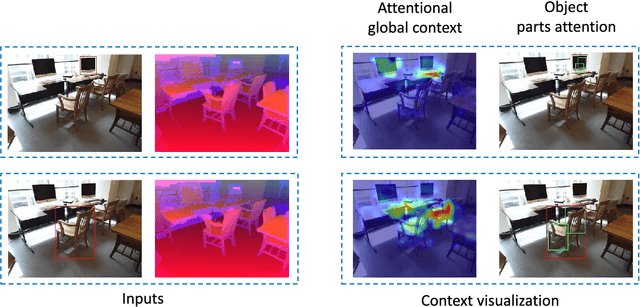
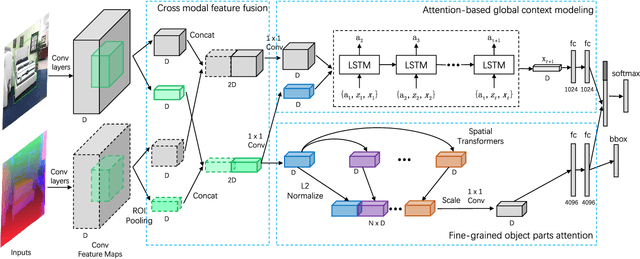
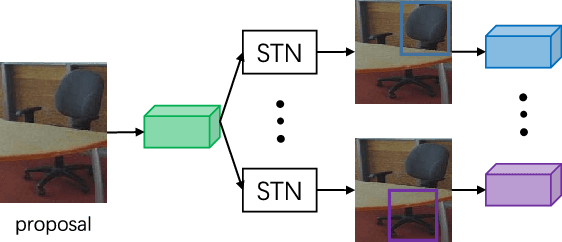
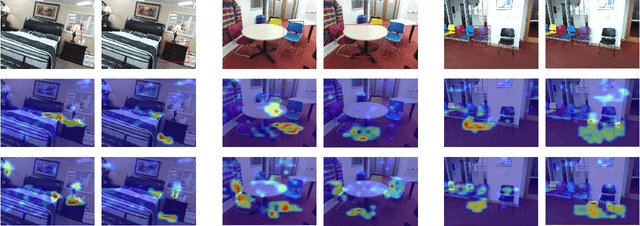
Recognizing objects from simultaneously sensed photometric (RGB) and depth channels is a fundamental yet practical problem in many machine vision applications such as robot grasping and autonomous driving. In this paper, we address this problem by developing a Cross-Modal Attentional Context (CMAC) learning framework, which enables the full exploitation of the context information from both RGB and depth data. Compared to existing RGB-D object detection frameworks, our approach has several appealing properties. First, it consists of an attention-based global context model for exploiting adaptive contextual information and incorporating this information into a region-based CNN (e.g., Fast RCNN) framework to achieve improved object detection performance. Second, our CMAC framework further contains a fine-grained object part attention module to harness multiple discriminative object parts inside each possible object region for superior local feature representation. While greatly improving the accuracy of RGB-D object detection, the effective cross-modal information fusion as well as attentional context modeling in our proposed model provide an interpretable visualization scheme. Experimental results demonstrate that the proposed method significantly improves upon the state of the art on all public benchmarks.