 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCross-environment Cooperation Enables Zero-shot Multi-agent Coordination
Paper and Code
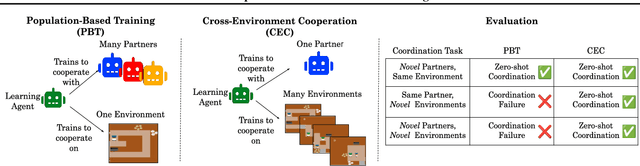
Zero-shot coordination (ZSC), the ability to adapt to a new partner in a cooperative task, is a critical component of human-compatible AI. While prior work has focused on training agents to cooperate on a single task, these specialized models do not generalize to new tasks, even if they are highly similar. Here, we study how reinforcement learning on a distribution of environments with a single partner enables learning general cooperative skills that support ZSC with many new partners on many new problems. We introduce two Jax-based, procedural generators that create billions of solvable coordination challenges. We develop a new paradigm called Cross-Environment Cooperation (CEC), and show that it outperforms competitive baselines quantitatively and qualitatively when collaborating with real people. Our findings suggest that learning to collaborate across many unique scenarios encourages agents to develop general norms, which prove effective for collaboration with different partners. Together, our results suggest a new route toward designing generalist cooperative agents capable of interacting with humans without requiring human data.