 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCoupling Vision and Proprioception for Navigation of Legged Robots
Paper and Code
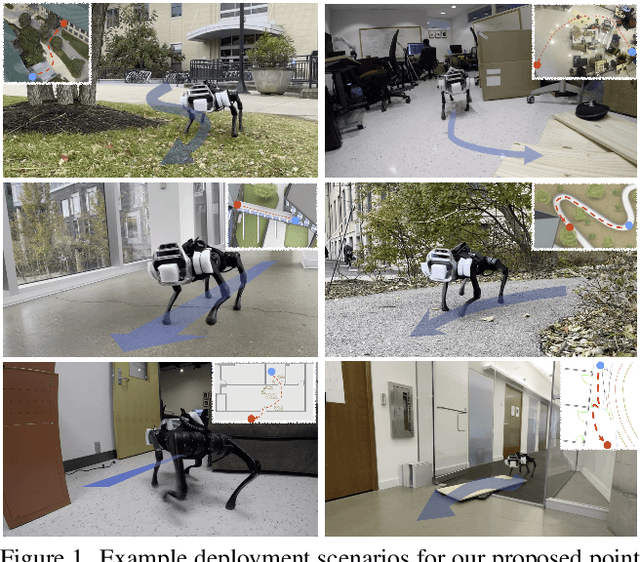
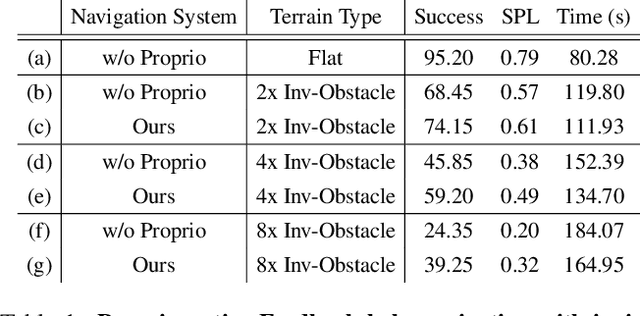
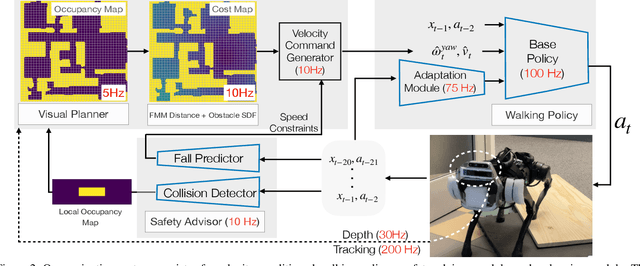
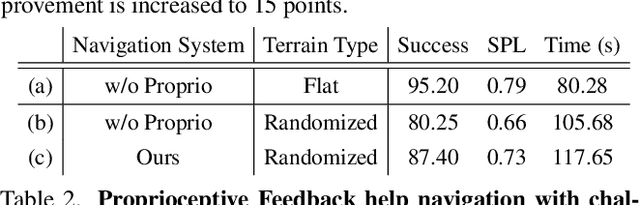
We exploit the complementary strengths of vision and proprioception to achieve point goal navigation in a legged robot. Legged systems are capable of traversing more complex terrain than wheeled robots, but to fully exploit this capability, we need the high-level path planner in the navigation system to be aware of the walking capabilities of the low-level locomotion policy on varying terrains. We achieve this by using proprioceptive feedback to estimate the safe operating limits of the walking policy, and to sense unexpected obstacles and terrain properties like smoothness or softness of the ground that may be missed by vision. The navigation system uses onboard cameras to generate an occupancy map and a corresponding cost map to reach the goal. The FMM (Fast Marching Method) planner then generates a target path. The velocity command generator takes this as input to generate the desired velocity for the locomotion policy using as input additional constraints, from the safety advisor, of unexpected obstacles and terrain determined speed limits. We show superior performance compared to wheeled robot (LoCoBot) baselines, and other baselines which have disjoint high-level planning and low-level control. We also show the real-world deployment of our system on a quadruped robot with onboard sensors and compute. Videos at https://navigation-locomotion.github.io/camera-ready