 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCoupled Iterative Refinement for 6D Multi-Object Pose Estimation
Paper and Code
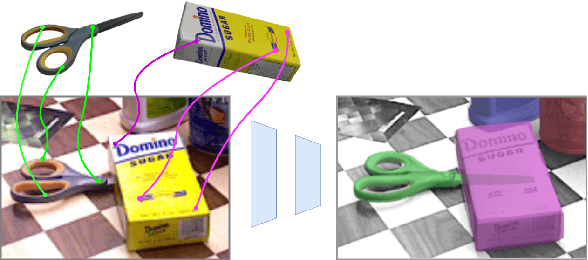
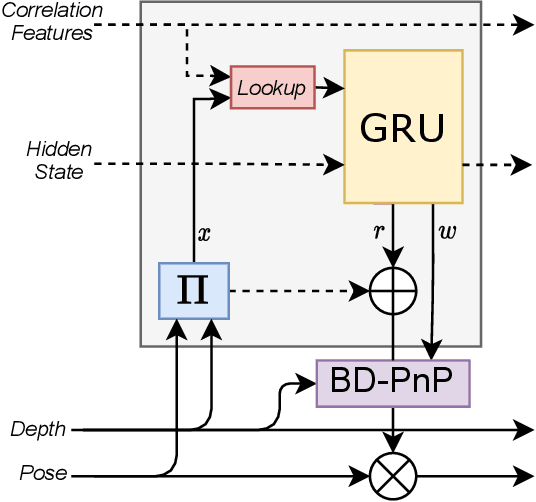
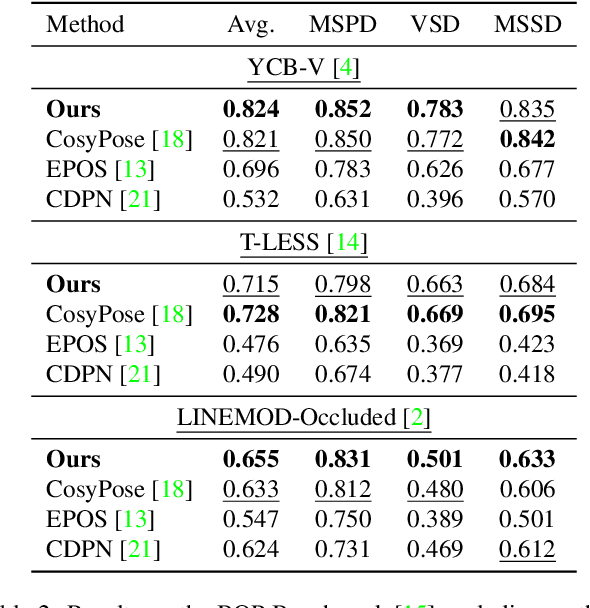
We address the task of 6D multi-object pose: given a set of known 3D objects and an RGB or RGB-D input image, we detect and estimate the 6D pose of each object. We propose a new approach to 6D object pose estimation which consists of an end-to-end differentiable architecture that makes use of geometric knowledge. Our approach iteratively refines both pose and correspondence in a tightly coupled manner, allowing us to dynamically remove outliers to improve accuracy. We use a novel differentiable layer to perform pose refinement by solving an optimization problem we refer to as Bidirectional Depth-Augmented Perspective-N-Point (BD-PnP). Our method achieves state-of-the-art accuracy on standard 6D Object Pose benchmarks. Code is available at https://github.com/princeton-vl/Coupled-Iterative-Refinement.