 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCost Splitting for Multi-Objective Conflict-Based Search
Paper and Code
Nov 23, 2022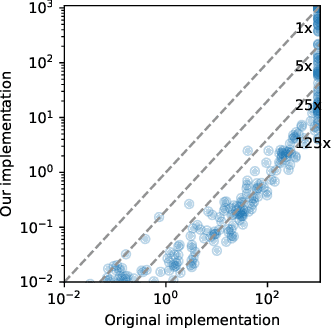
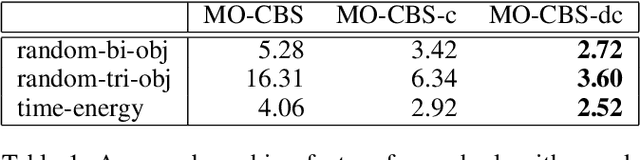

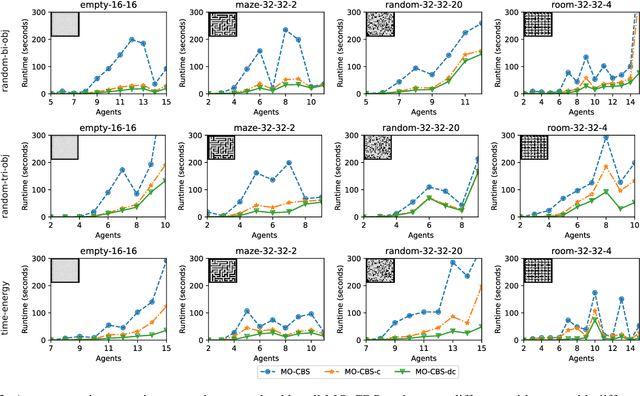
The Multi-Objective Multi-Agent Path Finding (MO-MAPF) problem is the problem of finding the Pareto-optimal frontier of collision-free paths for a team of agents while minimizing multiple cost metrics. Examples of such cost metrics include arrival times, travel distances, and energy consumption.In this paper, we focus on the Multi-Objective Conflict-Based Search (MO-CBS) algorithm, a state-of-the-art MO-MAPF algorithm. We show that the standard splitting strategy used by MO-CBS can lead to duplicate search nodes and hence can duplicate the search effort that MO-CBS needs to make. To address this issue, we propose two new splitting strategies for MO-CBS, namely cost splitting and disjoint cost splitting. Our theoretical results show that, when combined with either of these two new splitting strategies, MO-CBS maintains its completeness and optimality guarantees. Our experimental results show that disjoint cost splitting, our best splitting strategy, speeds up MO-CBS by up to two orders of magnitude and substantially improves its success rates in various settings.