 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCooperative trajectory planning algorithm of USV-UAV with hull dynamic constraints
Paper and Code
Sep 07, 2022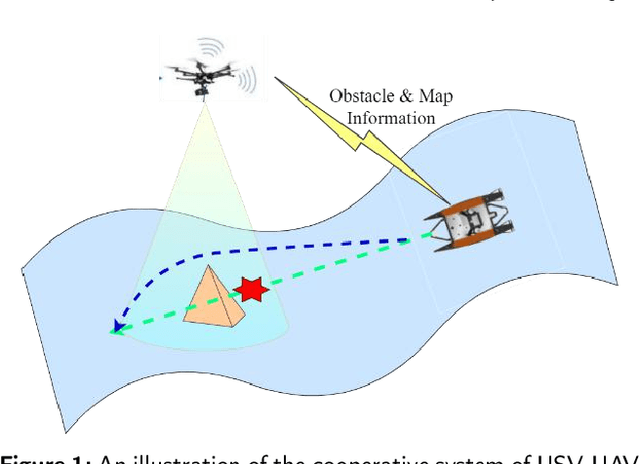

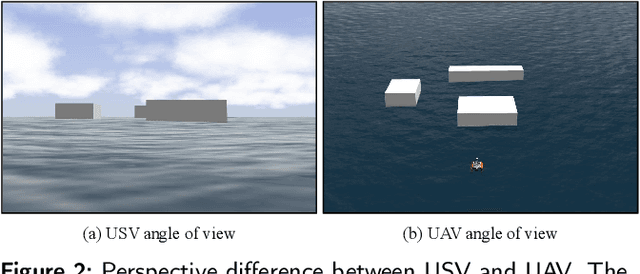
Efficient trajectory generation in complex dynamic environment stills remains an open problem in the unmanned surface vehicle (USV) domain. In this paper, a cooperative trajectory planning algorithm for the coupled USV-UAV system is proposed, to ensure that USV can execute safe and smooth path in the process of autonomous advance in multi obstacle maps. Specifically, the unmanned aerial vehicle (UAV) plays the role as a flight sensor, and it provides real-time global map and obstacle information with lightweight semantic segmentation network and 3D projection transformation. And then an initial obstacle avoidance trajectory is generated by a graph-based search method. Concerning the unique under-actuated kinematic characteristics of the USV, a numerical optimization method based on hull dynamic constraints is introduced to make the trajectory easier to be tracked for motion control. Finally, a motion control method based on NMPC with the lowest energy consumption constraint during execution is proposed. Experimental results verify the effectiveness of whole system, and the generated trajectory is locally optimal for USV with considerable tracking accuracy.