 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCooperation-Aware Lane Change Maneuver in Dense Traffic based on Model Predictive Control with Recurrent Neural Network
Paper and Code
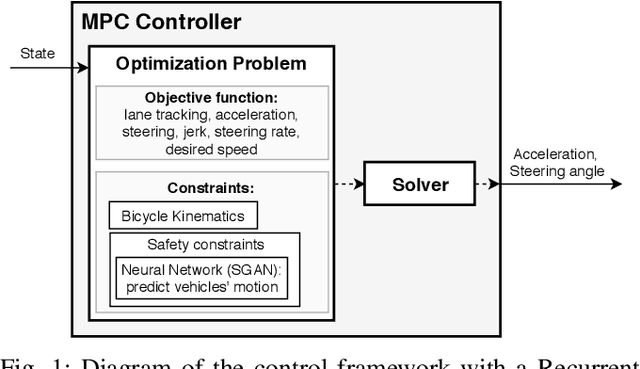
This paper presents a real-time lane change control framework of autonomous driving in dense traffic, which exploits cooperative behaviors of other drivers. This paper focuses on heavy traffic where vehicles cannot change lanes without cooperating with other drivers. In this case, classical robust controls may not apply since there is no safe area to merge to without interacting with the other drivers. That said, modeling complex and interactive human behaviors is highly non-trivial from the perspective of control engineers. We propose a mathematical control framework based on Model Predictive Control (MPC) encompassing a state-of-the-art Recurrent Neural network (RNN) architecture. In particular, RNN predicts interactive motions of other drivers in response to potential actions of the autonomous vehicle, which are then systematically evaluated in safety constraints. We also propose a real-time heuristic algorithm to find locally optimal control inputs. Finally, quantitative and qualitative analysis on simulation studies are presented to illustrate the benefits of the proposed framework.