Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeControl-Tutored Reinforcement Learning
Paper and Code
Dec 12, 2019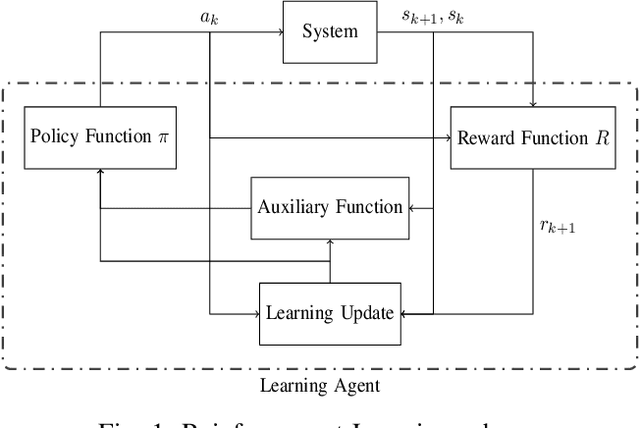
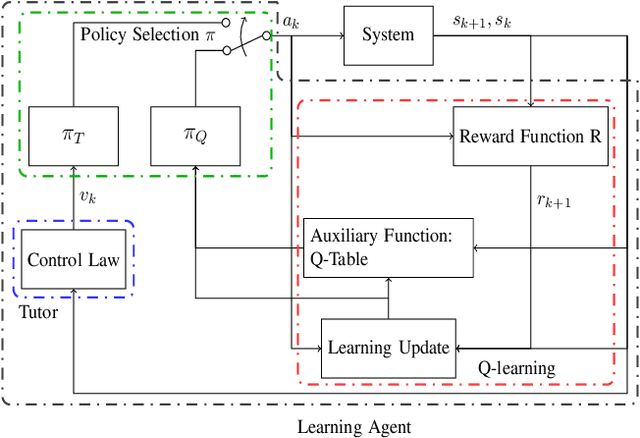
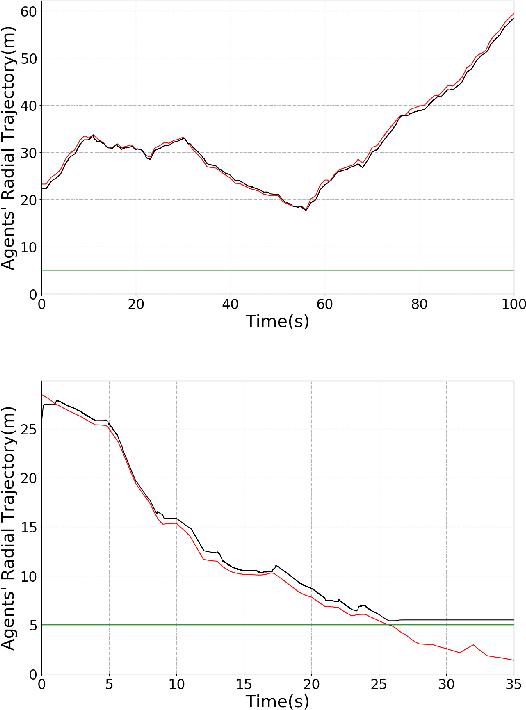
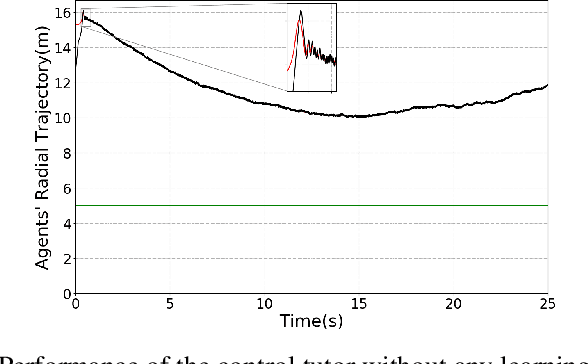
We introduce a control-tutored reinforcement learning (CTRL) algorithm. The idea is to enhance tabular learning algorithms so as to improve the exploration of the state-space, and substantially reduce learning times by leveraging some limited knowledge of the plant encoded into a tutoring model-based control strategy. We illustrate the benefits of our novel approach and its effectiveness by using the problem of controlling one or more agents to herd and contain within a goal region a set of target free-roving agents in the plane.
View paper on