 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeContinuous Doubly Constrained Batch Reinforcement Learning
Paper and Code
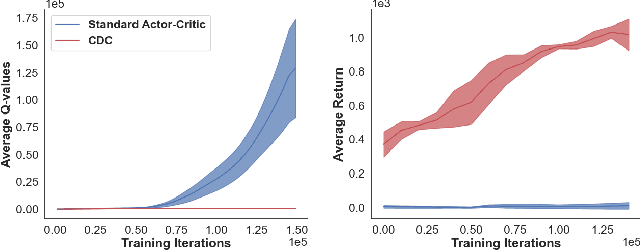


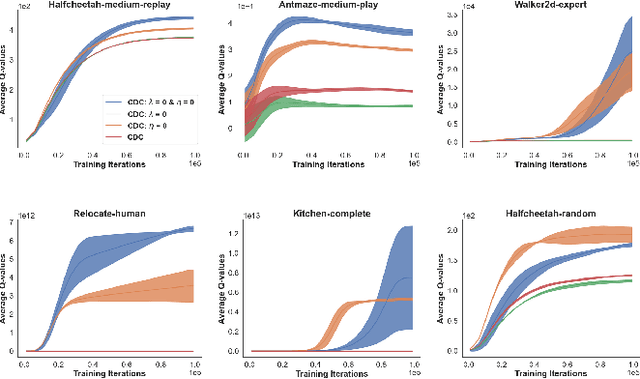
Reliant on too many experiments to learn good actions, current Reinforcement Learning (RL) algorithms have limited applicability in real-world settings, which can be too expensive to allow exploration. We propose an algorithm for batch RL, where effective policies are learned using only a fixed offline dataset instead of online interactions with the environment. The limited data in batch RL produces inherent uncertainty in value estimates of states/actions that were insufficiently represented in the training data. This leads to particularly severe extrapolation when our candidate policies diverge from one that generated the data. We propose to mitigate this issue via two straightforward penalties: a policy-constraint to reduce this divergence and a value-constraint that discourages overly optimistic estimates. Over a comprehensive set of 32 continuous-action batch RL benchmarks, our approach compares favorably to state-of-the-art methods, regardless of how the offline data were collected.