 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeContact Points Discovery for Soft-Body Manipulations with Differentiable Physics
Paper and Code
May 05, 2022

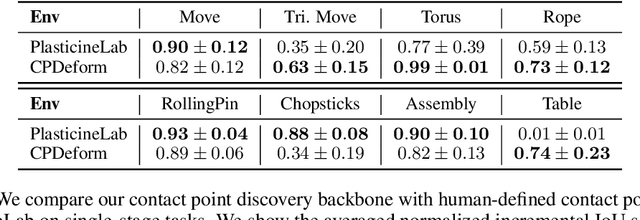

Differentiable physics has recently been shown as a powerful tool for solving soft-body manipulation tasks. However, the differentiable physics solver often gets stuck when the initial contact points of the end effectors are sub-optimal or when performing multi-stage tasks that require contact point switching, which often leads to local minima. To address this challenge, we propose a contact point discovery approach (CPDeform) that guides the stand-alone differentiable physics solver to deform various soft-body plasticines. The key idea of our approach is to integrate optimal transport-based contact points discovery into the differentiable physics solver to overcome the local minima from initial contact points or contact switching. On single-stage tasks, our method can automatically find suitable initial contact points based on transport priorities. On complex multi-stage tasks, we can iteratively switch the contact points of end-effectors based on transport priorities. To evaluate the effectiveness of our method, we introduce PlasticineLab-M that extends the existing differentiable physics benchmark PlasticineLab to seven new challenging multi-stage soft-body manipulation tasks. Extensive experimental results suggest that: 1) on multi-stage tasks that are infeasible for the vanilla differentiable physics solver, our approach discovers contact points that efficiently guide the solver to completion; 2) on tasks where the vanilla solver performs sub-optimally or near-optimally, our contact point discovery method performs better than or on par with the manipulation performance obtained with handcrafted contact points.