 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeConstrained-Space Optimization and Reinforcement Learning for Complex Tasks
Paper and Code
Apr 01, 2020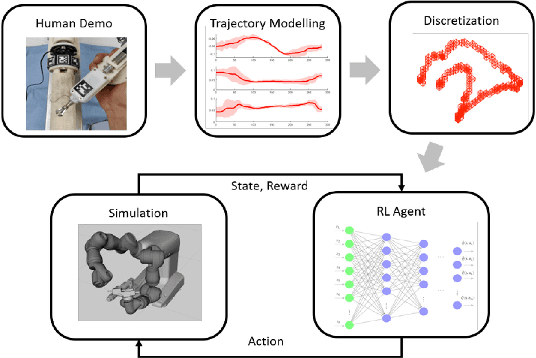
Learning from Demonstration is increasingly used for transferring operator manipulation skills to robots. In practice, it is important to cater for limited data and imperfect human demonstrations, as well as underlying safety constraints. This paper presents a constrained-space optimization and reinforcement learning scheme for managing complex tasks. Through interactions within the constrained space, the reinforcement learning agent is trained to optimize the manipulation skills according to a defined reward function. After learning, the optimal policy is derived from the well-trained reinforcement learning agent, which is then implemented to guide the robot to conduct tasks that are similar to the experts' demonstrations. The effectiveness of the proposed method is verified with a robotic suturing task, demonstrating that the learned policy outperformed the experts' demonstrations in terms of the smoothness of the joint motion and end-effector trajectories, as well as the overall task completion time.