Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeConditional Variational Autoencoders for Probabilistic Pose Regression
Paper and Code
Oct 07, 2024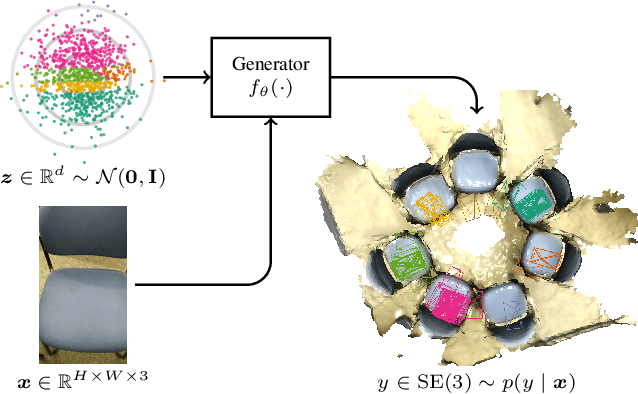
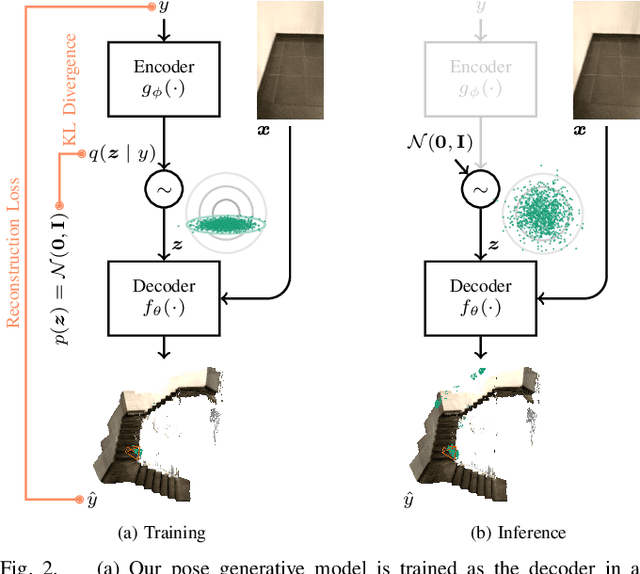
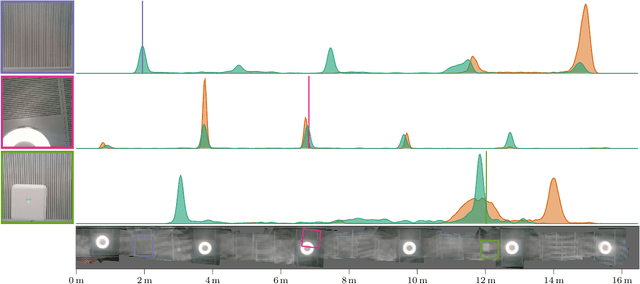
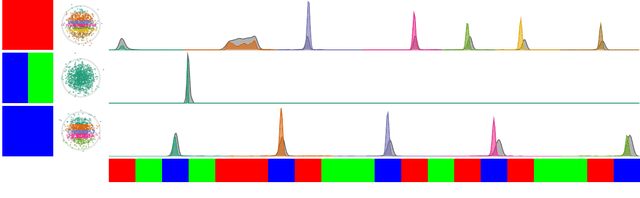
Robots rely on visual relocalization to estimate their pose from camera images when they lose track. One of the challenges in visual relocalization is repetitive structures in the operation environment of the robot. This calls for probabilistic methods that support multiple hypotheses for robot's pose. We propose such a probabilistic method to predict the posterior distribution of camera poses given an observed image. Our proposed training strategy results in a generative model of camera poses given an image, which can be used to draw samples from the pose posterior distribution. Our method is streamlined and well-founded in theory and outperforms existing methods on localization in presence of ambiguities.
* Accepted at IROS 2024
View paper on