 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeConditional t-SNE: Complementary t-SNE embeddings through factoring out prior information
Paper and Code
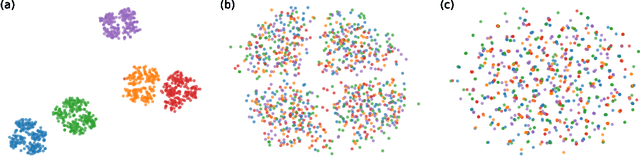



Dimensionality reduction and manifold learning methods such as t-Distributed Stochastic Neighbor Embedding (t-SNE) are routinely used to map high-dimensional data into a 2-dimensional space to visualize and explore the data. However, two dimensions are typically insufficient to capture all structure in the data, the salient structure is often already known, and it is not obvious how to extract the remaining information in a similarly effective manner. To fill this gap, we introduce \emph{conditional t-SNE} (ct-SNE), a generalization of t-SNE that discounts prior information from the embedding in the form of labels. To achieve this, we propose a conditioned version of the t-SNE objective, obtaining a single, integrated, and elegant method. ct-SNE has one extra parameter over t-SNE; we investigate its effects and show how to efficiently optimize the objective. Factoring out prior knowledge allows complementary structure to be captured in the embedding, providing new insights. Qualitative and quantitative empirical results on synthetic and (large) real data show ct-SNE is effective and achieves its goal.