 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeComposing Ensembles of Policies with Deep Reinforcement Learning
Paper and Code
May 25, 2019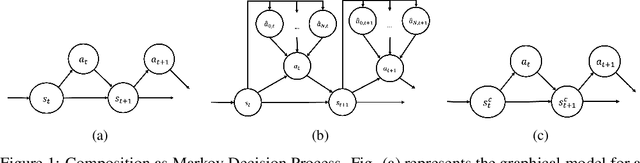

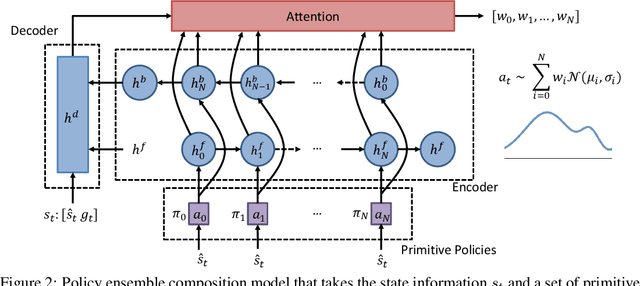
Composition of elementary skills into complex behaviors to solve challenging problems is one of the key elements toward building intelligent machines. To date, there has been plenty of work on learning new policies or skills but almost no focus on composing them to perform complex decision-making. In this paper, we propose a policy ensemble composition framework that takes the robot's primitive policies and learns to compose them concurrently or sequentially through reinforcement learning. We evaluate our method in problems where traditional approaches either fail or exhibit high sample complexity to find a solution. We show that our method not only solves the problems that require both task and motion planning but also exhibits high data efficiency, which is currently one of the main limitations of reinforcement learning.