 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeComponent-Based Distributed Framework for Coherent and Real-Time Video Dehazing
Paper and Code
Sep 09, 2016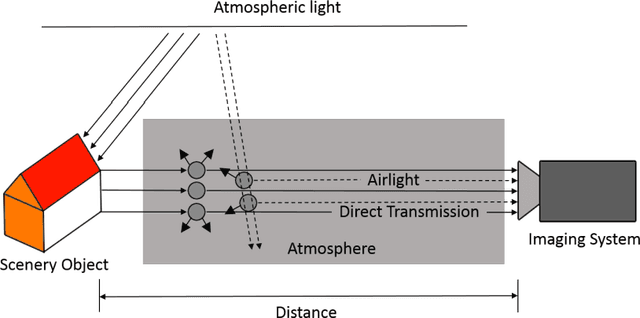
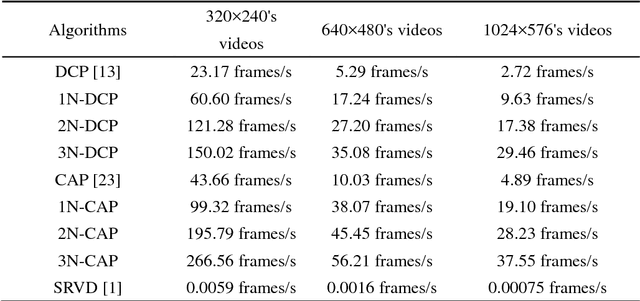
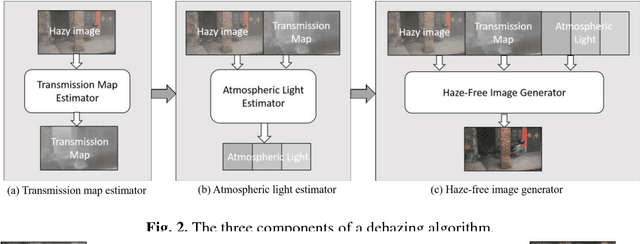
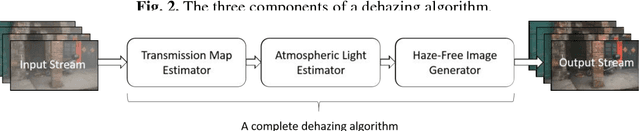
Traditional dehazing techniques, as a well studied topic in image processing, are now widely used to eliminate the haze effects from individual images. However, even the state-of-the-art dehazing algorithms may not provide sufficient support to video analytics, as a crucial pre-processing step for video-based decision making systems (e.g., robot navigation), due to the limitations of these algorithms on poor result coherence and low processing efficiency. This paper presents a new framework, particularly designed for video dehazing, to output coherent results in real time, with two novel techniques. Firstly, we decompose the dehazing algorithms into three generic components, namely transmission map estimator, atmospheric light estimator and haze-free image generator. They can be simultaneously processed by multiple threads in the distributed system, such that the processing efficiency is optimized by automatic CPU resource allocation based on the workloads. Secondly, a cross-frame normalization scheme is proposed to enhance the coherence among consecutive frames, by sharing the parameters of atmospheric light from consecutive frames in the distributed computation platform. The combination of these techniques enables our framework to generate highly consistent and accurate dehazing results in real-time, by using only 3 PCs connected by Ethernet.