 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeComparison of Pedestrian Prediction Models from Trajectory and Appearance Data for Autonomous Driving
Paper and Code
May 25, 2023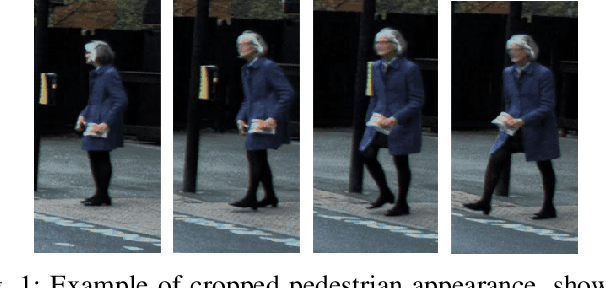
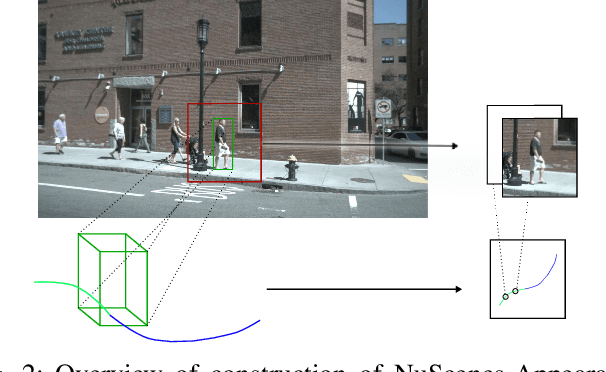
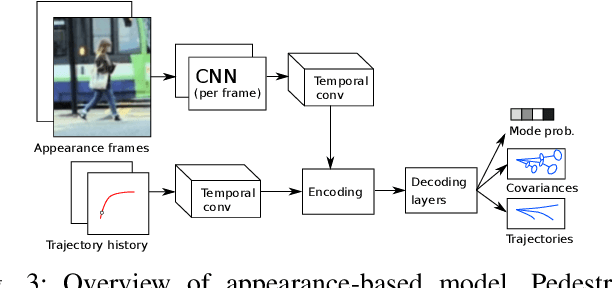
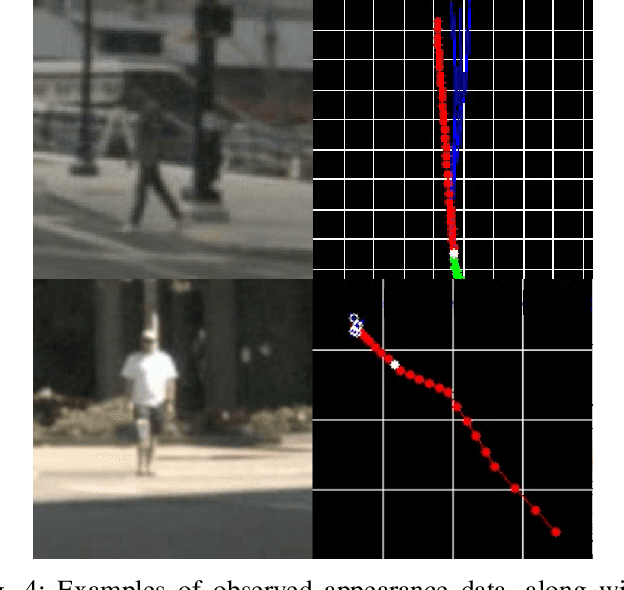
The ability to anticipate pedestrian motion changes is a critical capability for autonomous vehicles. In urban environments, pedestrians may enter the road area and create a high risk for driving, and it is important to identify these cases. Typical predictors use the trajectory history to predict future motion, however in cases of motion initiation, motion in the trajectory may only be clearly visible after a delay, which can result in the pedestrian has entered the road area before an accurate prediction can be made. Appearance data includes useful information such as changes of gait, which are early indicators of motion changes, and can inform trajectory prediction. This work presents a comparative evaluation of trajectory-only and appearance-based methods for pedestrian prediction, and introduces a new dataset experiment for prediction using appearance. We create two trajectory and image datasets based on the combination of image and trajectory sequences from the popular NuScenes dataset, and examine prediction of trajectories using observed appearance to influence futures. This shows some advantages over trajectory prediction alone, although problems with the dataset prevent advantages of appearance-based models from being shown. We describe methods for improving the dataset and experiment to allow benefits of appearance-based models to be captured.