 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCombining Shape Completion and Grasp Prediction for Fast and Versatile Grasping with a Multi-Fingered Hand
Paper and Code
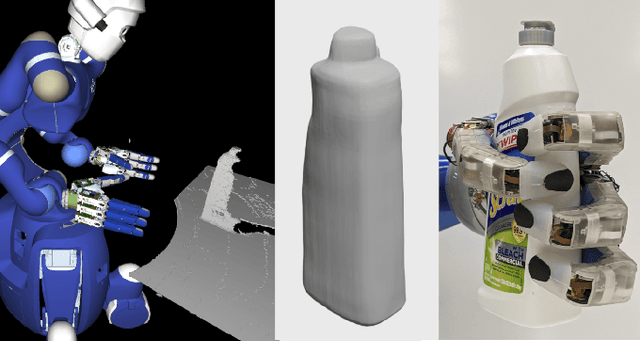
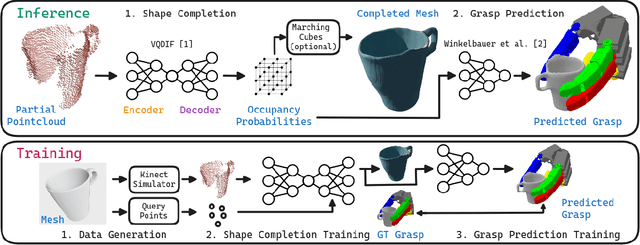
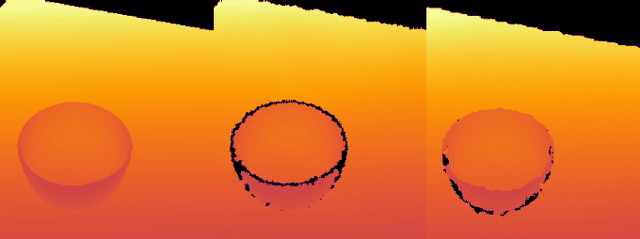
Grasping objects with limited or no prior knowledge about them is a highly relevant skill in assistive robotics. Still, in this general setting, it has remained an open problem, especially when it comes to only partial observability and versatile grasping with multi-fingered hands. We present a novel, fast, and high fidelity deep learning pipeline consisting of a shape completion module that is based on a single depth image, and followed by a grasp predictor that is based on the predicted object shape. The shape completion network is based on VQDIF and predicts spatial occupancy values at arbitrary query points. As grasp predictor, we use our two-stage architecture that first generates hand poses using an autoregressive model and then regresses finger joint configurations per pose. Critical factors turn out to be sufficient data realism and augmentation, as well as special attention to difficult cases during training. Experiments on a physical robot platform demonstrate successful grasping of a wide range of household objects based on a depth image from a single viewpoint. The whole pipeline is fast, taking only about 1 s for completing the object's shape (0.7 s) and generating 1000 grasps (0.3 s).