 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCombining Reinforcement Learning with Model Predictive Control for On-Ramp Merging
Paper and Code

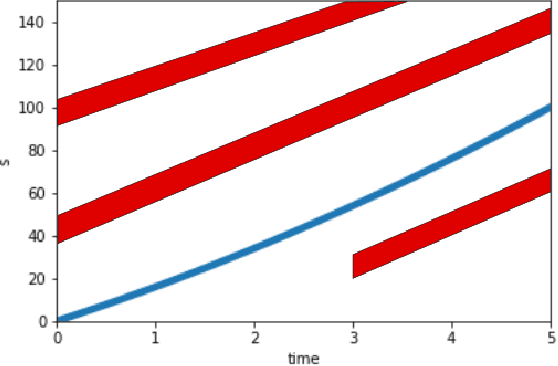
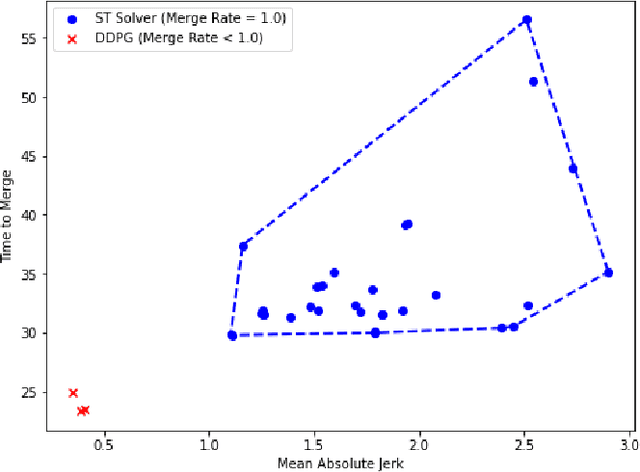
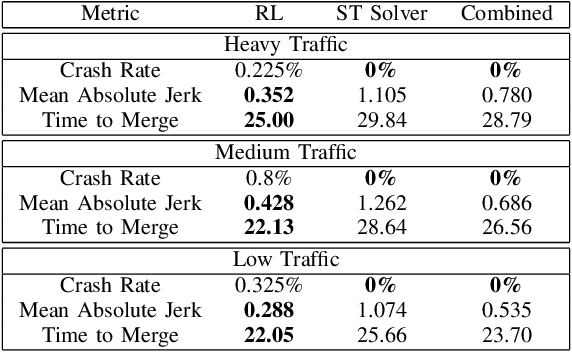
We consider the problem of designing an algorithm to allow a car to autonomously merge on to a highway from an on-ramp. Two broad classes of techniques have been proposed to solve motion planning problems in autonomous driving: Model Predictive Control (MPC) and Reinforcement Learning (RL). In this paper, we first establish the strengths and weaknesses of state-of-the-art MPC and RL-based techniques through simulations. We show that the performance of the RL agent is worse than that of the MPC solution from the perspective of safety and robustness to out-of-distribution traffic patterns, i.e., traffic patterns which were not seen by the RL agent during training. On the other hand, the performance of the RL agent is better than that of the MPC solution when it comes to efficiency and passenger comfort. We subsequently present an algorithm which blends the model-free RL agent with the MPC solution and show that it provides better trade-offs between all metrics -- passenger comfort, efficiency, crash rate and robustness.