 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCombining Deep Reinforcement Learning and Safety Based Control for Autonomous Driving
Paper and Code
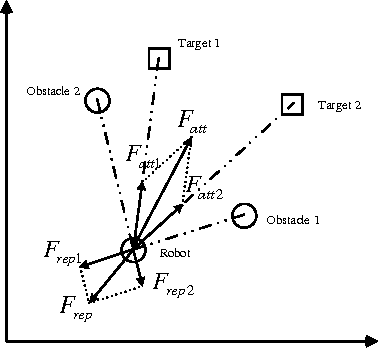
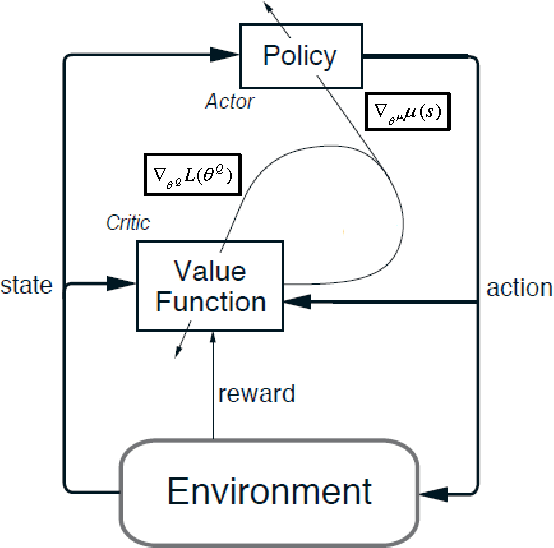
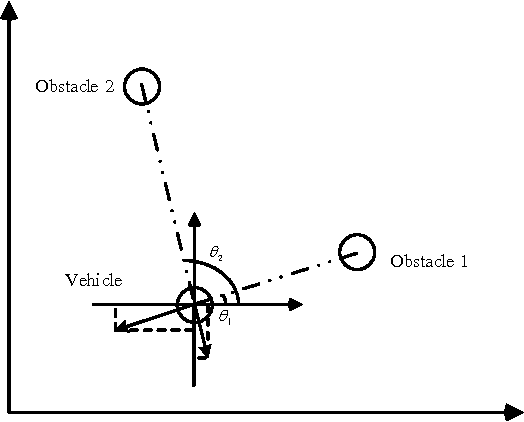
With the development of state-of-art deep reinforcement learning, we can efficiently tackle continuous control problems. But the deep reinforcement learning method for continuous control is based on historical data, which would make unpredicted decisions in unfamiliar scenarios. Combining deep reinforcement learning and safety based control can get good performance for self-driving and collision avoidance. In this passage, we use the Deep Deterministic Policy Gradient algorithm to implement autonomous driving without vehicles around. The vehicle can learn the driving policy in a stable and familiar environment, which is efficient and reliable. Then we use the artificial potential field to design collision avoidance algorithm with vehicles around. The path tracking method is also taken into consideration. The combination of deep reinforcement learning and safety based control performs well in most scenarios.