 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCombinational Class Activation Maps for Weakly Supervised Object Localization
Paper and Code
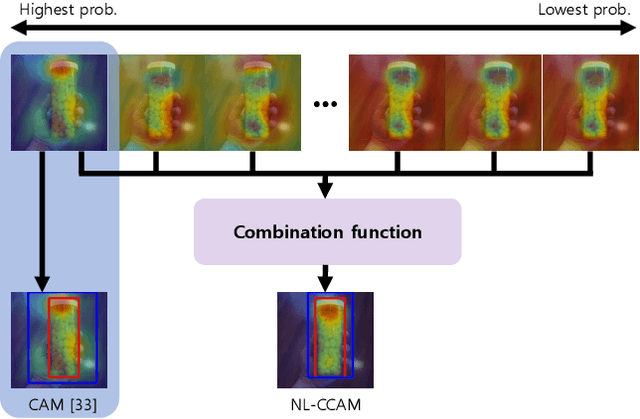
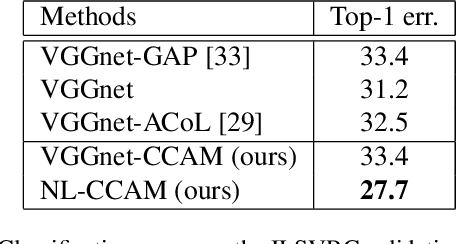
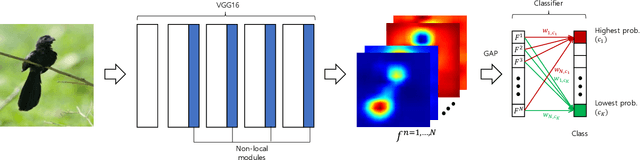
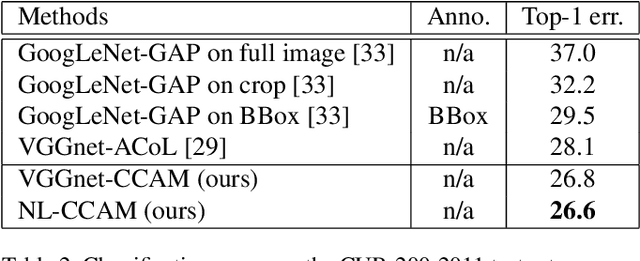
Weakly supervised object localization has recently attracted attention since it aims to identify both class labels and locations of objects by using image-level labels. Most previous methods utilize the activation map corresponding to the highest activation source. Exploiting only one activation map of the highest probability class is often biased into limited regions or sometimes even highlights background regions. To resolve these limitations, we propose to use activation maps, named combinational class activation maps (CCAM), which are linear combinations of activation maps from the highest to the lowest probability class. By using CCAM for localization, we suppress background regions to help highlighting foreground objects more accurately. In addition, we design the network architecture to consider spatial relationships for localizing relevant object regions. Specifically, we integrate non-local modules into an existing base network at both low- and high-level layers. Our final model, named non-local combinational class activation maps (NL-CCAM), obtains superior performance compared to previous methods on representative object localization benchmarks including ILSVRC 2016 and CUB-200-2011. Furthermore, we show that the proposed method has a great capability of generalization by visualizing other datasets.