 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCollective Conditioned Reflex: A Bio-Inspired Fast Emergency Reaction Mechanism for Designing Safe Multi-Robot Systems
Paper and Code
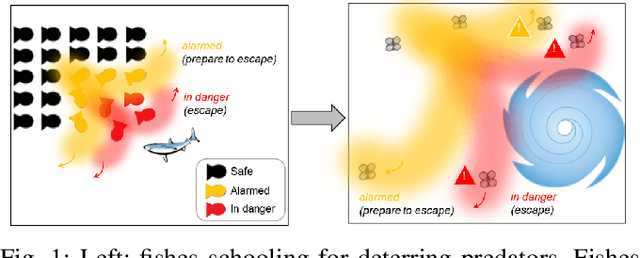

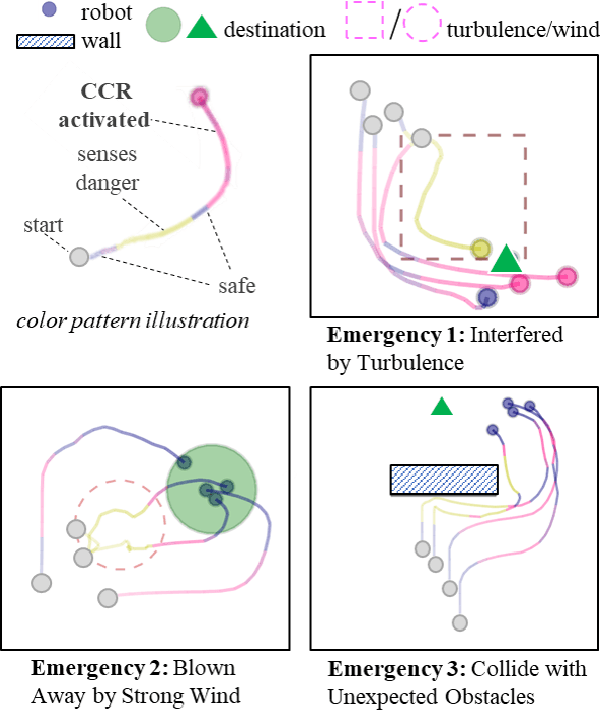
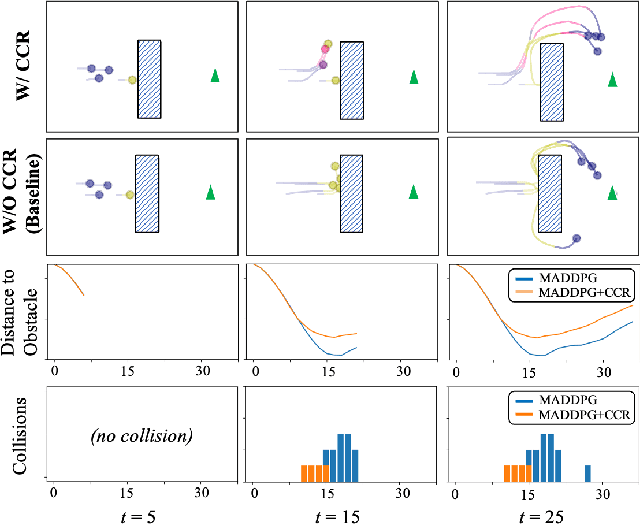
A multi-robot system (MRS) is a group of coordinated robots designed to cooperate with each other and accomplish set tasks. Due to the uncertainties in operating environments, the system may encounter unexpected emergencies, such as unobserved obstacles, unexpectedly moving vehicles, explosions, and fires. Animal groups such as bee colonies initiate collective emergency reaction behaviors such as bypassing the front trees and avoiding back predators, similar to muscle conditioned reflex which organizes local muscles to avoid hazards in the first response without delaying passage through the central brain. Inspired by this, we develop a similar collective conditioned reflex mechanism for multi-robot systems to respond to emergencies. In this study, Collective Conditioned Reflex (CCR), a bio-inspired emergency reaction mechanism, is developed based on animal collective behavior analysis and multi-agent reinforcement learning. The algorithm uses a physical model to determine if the robots are experiencing an emergency; then, rewards for robots involved in the emergency are augmented with corresponding heuristic rewards, which evaluate emergency magnitudes and consequences and decide local robots' participation. CCR is validated on three typical emergency scenarios: unexpected turbulence, strong wind, and uncertain obstacle. Experimental results demonstrate that CCR improves robot teams' emergency reaction capability with faster reaction speed and safer trajectory adjustment compared with traditional methods.