 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCoarse-to-fine Semantic Localization with HD Map for Autonomous Driving in Structural Scenes
Paper and Code
Jul 06, 2021

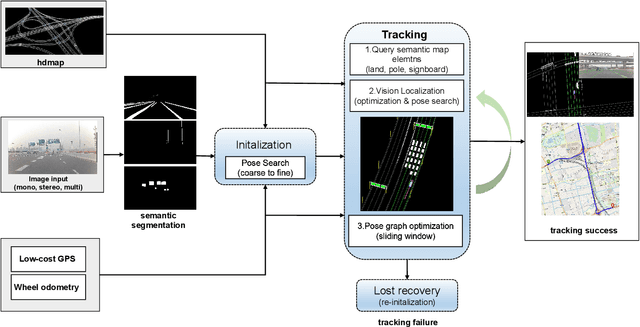

Robust and accurate localization is an essential component for robotic navigation and autonomous driving. The use of cameras for localization with high definition map (HD Map) provides an affordable localization sensor set. Existing methods suffer from pose estimation failure due to error prone data association or initialization with accurate initial pose requirement. In this paper, we propose a cost-effective vehicle localization system with HD map for autonomous driving that uses cameras as primary sensors. To this end, we formulate vision-based localization as a data association problem that maps visual semantics to landmarks in HD map. Specifically, system initialization is finished in a coarse to fine manner by combining coarse GPS (Global Positioning System) measurement and fine pose searching. In tracking stage, vehicle pose is refined by implicitly aligning the semantic segmentation result between image and landmarks in HD maps with photometric consistency. Finally, vehicle pose is computed by pose graph optimization in a sliding window fashion. We evaluate our method on two datasets and demonstrate that the proposed approach yields promising localization results in different driving scenarios. Additionally, our approach is suitable for both monocular camera and multi-cameras that provides flexibility and improves robustness for the localization system.